Planejar
Storyboard 
Se o objeto (avião/ave) mantiver um ângulo de ataque ligeiramente negativo, pode fazer com que parte da força de sustentação contribua para impulsionar e contrariar a resistência. Desde que a força de sustentação restante não seja muito inferior à força da gravidade, o objeto pode permanecer no ar por um longo período. Isso pode ser chamado de um descente controlada extremamente lenta ou planagem.
ID:(466, 0)
Planejar
Storyboard
Se o objeto (avião/ave) mantiver um ângulo de ataque ligeiramente negativo, pode fazer com que parte da força de sustentação contribua para impulsionar e contrariar a resistência. Desde que a força de sustentação restante não seja muito inferior à força da gravidade, o objeto pode permanecer no ar por um longo período. Isso pode ser chamado de um descente controlada extremamente lenta ou planagem.
Variáveis
Cálculos
Cálculos
Equações
La força de elevação ($F_L$), juntamente com la envergadura das asas ($L$), la densidade ($\rho$), o fator de velocidade máxima da asa ($c_t$), o fator de velocidade inferior da asa ($c_b$), la comprimento superior da asa ($l_t$), la comprimento inferior da asa ($l_b$) e la velocidade em relação ao meio ($v$), encontra-se em
Se considerarmos la superfície que gera sustentação ($S_w$), definido por la envergadura das asas ($L$), la comprimento superior da asa ($l_t$) e la comprimento inferior da asa ($l_b$),
e para o coeficiente de elevação ($C_L$), definido como
obtemos
De maneira semelhante forma como a equa o para la força de elevação ($F_L$) foi obtida utilizando la densidade ($\rho$), o coeficiente de elevação ($C_L$), la superfície que gera sustentação ($S_w$) e la velocidade em relação ao meio ($v$)
nesta analogia, o que corresponde a la superfície que gera sustentação ($S_w$) ser equivalente a o perfil total do objeto ($S_p$) e o coeficiente de elevação ($C_L$) a o coeficiente de resistência ($C_W$), resultando no c lculo de la força de resistência ($F_W$):
O coeficiente de arrasto medido e, em fluxos turbulentos sobre corpos aerodin micos, geralmente se obt m valores em torno de 0.4.
Se considerarmos la força de elevação ($F_L$), la força de resistência ($F_W$), la massa corporal ($m$), la aceleração gravitacional ($g$) e o ângulo de deslizamento ($\phi$), a for a durante o planeio na dire o vertical :
e na dire o horizontal :
Isso nos permite eliminar la força de resistência ($F_W$), resultando em:
$F_L=F_W\displaystyle\frac{\cos\phi}{\sin\phi} \rightarrow F_W(\sin^2\phi+\cos^2\phi)=mg\sin\phi$
Portanto, la força de elevação ($F_L$) :
Se considerarmos la força de elevação ($F_L$), la força de resistência ($F_W$), la massa corporal ($m$), la aceleração gravitacional ($g$) e o ângulo de deslizamento ($\phi$), a for a durante o planeio na dire o vertical :
e na dire o horizontal :
Isso nos permite eliminar la força de elevação ($F_L$), resultando em:
$F_L=F_W\displaystyle\frac{\cos\phi}{\sin\phi} \rightarrow F_W(\sin^2\phi+\cos^2\phi)=mg\sin\phi$
la força de resistência ($F_W$) deve ser:
Vamos considerar la força de elevação ($F_L$), la força de resistência ($F_W$), la massa corporal ($m$), la aceleração gravitacional ($g$) e o ângulo de deslizamento ($\phi$). Com essas for as, a for a de sustenta o calculada da seguinte forma:
e a for a de arrasto como:
Podemos determinar o ângulo de deslizamento ($\phi$) dividindo la força de elevação ($F_L$) por la força de resistência ($F_W$), resultando em:
$\tan\phi=\displaystyle\frac{F_W}{F_L}$
Onde la força de resistência ($F_W$) calculado usando a seguinte equa o:
com o perfil total do objeto ($S_p$) e o coeficiente de resistência ($C_W$). Da mesma forma, la força de elevação ($F_L$) calculado da seguinte forma:
com la superfície que gera sustentação ($S_w$) e o coeficiente de elevação ($C_L$).
Com ambas as for as, podemos determinar o ngulo de ataque necess rio para o planador da seguinte forma:
Exemplos
Uma t cnica de voo conhecida como planar. Nesta t cnica, as asas s o usadas tanto para propuls o quanto para se manter no ar. Para alcan ar isso, essencial ajustar o ngulo de ataque da asa de forma que a for a de sustenta o compense a for a gravitacional. Como resultado, o planar se torna uma descida controlada, na qual a descida aproveitada para gerar sustenta o e, assim, reduzir a velocidade de maneira controlada.
A chave para planar inclinar a aeronave ou ave para a frente, ou seja, ter um ngulo negativo representado por ERROR:6121,0. Com esse ngulo negativo, o vetor la força de elevação ($F_L$) aponta para cima e para frente em vez de para tr s. Isso resulta em uma for a de tra o em vez de la força de resistência ($F_W$), impulsionando a aeronave ou ave e gerando velocidade, o que, por sua vez, cria a sustenta o necess ria.
Esse mecanismo permite o voo, mas essencial entender que essencialmente uma descida lenta e controlada, uma vez que n o se alcan a um uma força de elevação ($F_L$) vertical que compense completamente o pr prio peso. Portanto, necess rio levar a planadora a altas altitudes ou permitir que a ave ganhe altura inicialmente por meio de sua pr pria propuls o. Em seguida, ambos procuram correntes ascendentes que lhes permitem planar dentro de uma corrente ascendente mais forte do que a velocidade de descida da planadora. Dessa forma, eles podem permanecer em voo por longos per odos sem a necessidade de aterrissar.
Da mesma forma que o aceleração máxima ($\alpha$) definido como o ngulo entre a linha central da asa e o horizonte, seu equivalente negativo pode ser definido como o ângulo de deslizamento ($\phi$).
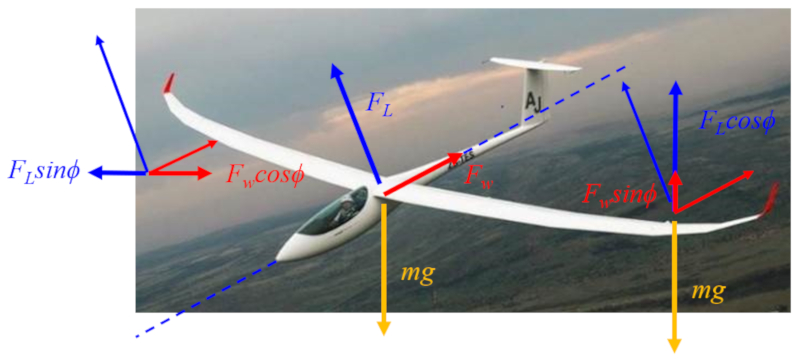
No caso das for as, temos as seguintes a es:
• la força de elevação ($F_L$) age perpendicularmente ao eixo da aeronave ou ave.
• la força de resistência ($F_W$) age ao longo do eixo da aeronave ou ave.
• la força gravitacional ($F_g$) ($mg$) age verticalmente.
Essas tr s for as s o representadas no centro do diagrama:
No lado esquerdo, pode-se observar a componente horizontal, onde a sustenta o contraria o arrasto, atuando como impulso.
No lado direito, s o vis veis as componentes verticais, onde ambas as for as aerodin micas (sustenta o e arrasto) se op em ao peso que age sobre o centro de massa.
Embora as for as se anulem entre si, o planador desce porque sua dire o de voo determinada pelo ngulo de planagem.
Se considerarmos la força de elevação ($F_L$), la força de resistência ($F_W$), la massa corporal ($m$), la aceleração gravitacional ($g$) e o ângulo de deslizamento ($\phi$), a for a durante o planeio na dire o vertical :
e na dire o horizontal :
Isso nos permite eliminar la força de elevação ($F_L$), resultando em:
$F_L=F_W\displaystyle\frac{\cos\phi}{\sin\phi} \rightarrow F_W(\sin^2\phi+\cos^2\phi)=mg\sin\phi$
la força de resistência ($F_W$) deve ser:
Se considerarmos la força de elevação ($F_L$), la força de resistência ($F_W$), la massa corporal ($m$), la aceleração gravitacional ($g$) e o ângulo de deslizamento ($\phi$), a for a durante o planeio na dire o vertical :
e na dire o horizontal :
Isso nos permite eliminar la força de resistência ($F_W$), resultando em:
$F_L=F_W\displaystyle\frac{\cos\phi}{\sin\phi} \rightarrow F_W(\sin^2\phi+\cos^2\phi)=mg\sin\phi$
Portanto, la força de elevação ($F_L$) :
Vamos considerar la força de elevação ($F_L$), la força de resistência ($F_W$), la massa corporal ($m$), la aceleração gravitacional ($g$) e o ângulo de deslizamento ($\phi$). Com essas for as, a for a de sustenta o calculada da seguinte forma:
e a for a de arrasto como:
Podemos determinar o ângulo de deslizamento ($\phi$) dividindo la força de elevação ($F_L$) por la força de resistência ($F_W$), resultando em:
$\tan\phi=\displaystyle\frac{F_W}{F_L}$
Onde la força de resistência ($F_W$) calculado usando a seguinte equa o:
com o perfil total do objeto ($S_p$) e o coeficiente de resistência ($C_W$). Da mesma forma, la força de elevação ($F_L$) calculado da seguinte forma:
com la superfície que gera sustentação ($S_w$) e o coeficiente de elevação ($C_L$).
Com ambas as for as, podemos determinar o ngulo de ataque necess rio para o planador da seguinte forma:
No caso do planar, o objetivo manter uma velocidade constante, o que significa que la força de elevação ($F_L$) deve gerar propuls o suficiente para contrariar la força de resistência ($F_W$).
Para alcan ar este ERROR:6120,0, a ave ou a aeronave gera um um aceleração máxima ($\alpha$) negativo, o que significa que parte de la força de elevação ($F_L$) se converte em for a de propuls o. Esta componente de for a igual ao seno do ngulo.
A inclina o tamb m leva a uma redu o em la força de resistência ($F_W$), uma vez que parte dela contribui para a sustenta o. Neste caso, a componente que ainda contribui para a resist ncia esta for a multiplicada pelo cosseno do ngulo.
Portanto, a equa o de for a no plano horizontal pode ser expressa como:
Em vez de usar o aceleração máxima ($\alpha$), trabalharemos com o ângulo de deslizamento ($\phi$).
No plano vertical, o ângulo de deslizamento ($\phi$) resulta em uma redu o de la força de elevação ($F_L$) por um fator igual ao cosseno do ngulo. Por outro lado, faz com que la força de resistência ($F_W$) contribua com a sustenta o com um fator igual ao seno do ngulo. Ambas as for as devem contrabalan ar o peso gerado por la massa corporal ($m$) e la aceleração gravitacional ($g$), ent o temos:
La força de elevação ($F_L$) com la massa corporal ($m$), la aceleração gravitacional ($g$) e o ângulo de deslizamento ($\phi$) igual a:
La força de resistência ($F_W$) com la massa corporal ($m$), la aceleração gravitacional ($g$) e o ângulo de deslizamento ($\phi$) igual a:
La força de elevação ($F_L$) e la força de resistência ($F_W$) dependem de la massa corporal ($m$), la aceleração gravitacional ($g$), e o ângulo de deslizamento ($\phi$). Ambas as equa es nos permitem calcular o ângulo de deslizamento ($\phi$) em termos de la força de elevação ($F_L$) e la força de resistência ($F_W$).
Uma vez que la força de elevação ($F_L$) e la força de resistência ($F_W$) s o fun es de la massa corporal ($m$), la velocidade em relação ao meio ($v$), la superfície que gera sustentação ($S_w$), o perfil total do objeto ($S_p$), o coeficiente de elevação ($C_L$) e o coeficiente de resistência ($C_W$), podemos demonstrar que o ângulo de deslizamento ($\phi$) :
Para gerar uma press o maior abaixo do que acima da asa e gerar sustenta o, utiliza-se o princ pio de Bernoulli, corrigindo a falta de conserva o da densidade de energia com um coeficiente de elevação ($C_L$). A press o sobre a asa, la força de elevação ($F_L$), pode ser estimada usando la densidade ($\rho$), la superfície que gera sustentação ($S_w$), o coeficiente de elevação ($C_L$) e la velocidade em relação ao meio ($v$) atrav s da seguinte f rmula:
La força de resistência ($F_W$) pode ser calculado usando la densidade ($\rho$), o coeficiente de resistência ($C_W$), o perfil total do objeto ($S_p$) e la velocidade em relação ao meio ($v$) de acordo com o seguinte f rmula:
ID:(466, 0)