
Força de uma mola
Storyboard 
A força gerada por uma mola é diretamente proporcional à sua elongação.
A constante de proporcionalidade é chamada de constante da mola ou constante de Hooke. Da mesma forma, a relação dessa força é chamada de Lei de Hooke.
ID:(1414, 0)
Mecanismos
Iframe
Mecanismos
ID:(15521, 0)
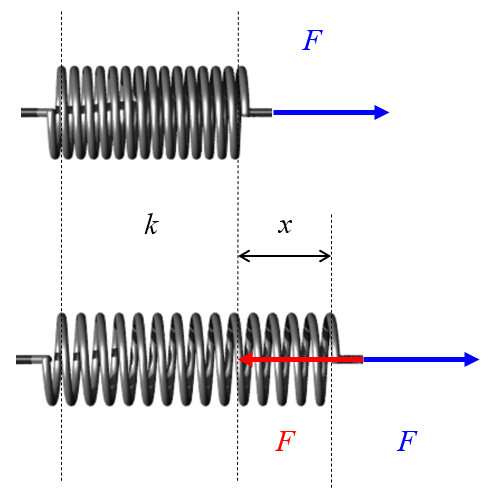
Lei de Hooke
Imagem
Se a força necessária para alcançar uma determinada elongação na mola for medida, perceberá que ambas são proporcionais:

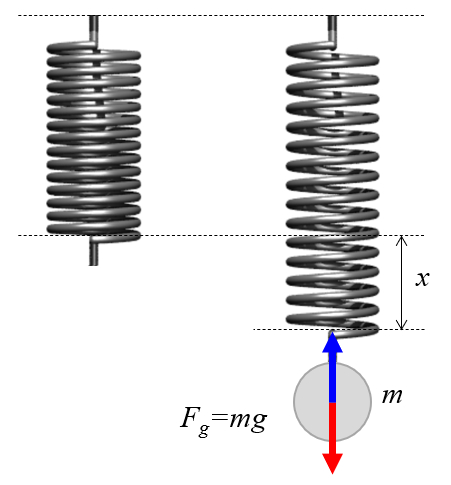
A mola é pendurada verticalmente e pesos conhecidos são adicionados a ela. A elongação resultante é medida e um gráfico de força versus elongação é traçado. A inclinação dessa relação, conhecida como constante elástica da mola ou constante de Hooke, depende das propriedades da mola.
A linearidade dessa relação permite o uso de molas como um método para medir forças.
A força pode ser medida usando uma mola, estabelecendo uma escala proporcional à elongação que indica diretamente a força associada.
O instrumento usado para medir forças usando uma mola é chamado de dinamômetro (a 'dina' é a unidade de força no sistema cgs - centímetros, gramas, segundos - de modo que 10^5 dinas equivalem a um Newton).
ID:(11530, 0)
Estudo do comportamento da mola
Imagem
Para estudar como a mola se alonga, ela pode ser suspensa verticalmente e gradualmente carregada com pesos conhecidos.
ID:(12528, 0)
Modelo
Top
Parâmetros
Variáveis
Cálculos
Cálculos
Cálculos
Equações
F = F_k - F_g
F = F_k - F_g
F = m_i a
F = m_i * a
F_g = m_g g
F_g = m_g * g
F_k = k x
F_k = k * u
m_g = m_i
m_g = m_i
m_i a = k x - m_g g
m_i * a = k * x - m_g * g
\nu =\displaystyle\frac{1}{ T }
nu =1/ T
\omega = 2 \pi \nu
omega = 2* pi * nu
\omega = \displaystyle\frac{2 \pi }{ T }
omega = 2* pi / T
\omega_0 ^2=\displaystyle\frac{ k }{ m_i }
omega_0 ^2 = k / m_i
v = - x_0 \omega \sin \omega t + v_0 \cos \omega t
v = - x_0 * omega_0 *sin( omega_0 * t )+ v_0 *cos( omega_0 * t )
x = x_0 \cos \omega t + \displaystyle\frac{ v_0 }{ \omega }\sin \omega t + \displaystyle\frac{ g }{ \omega ^2}
x = x_0 *cos( omega_0 * t )+ v_0 *sin( omega_0 * t )/ omega_0 + g / omega_0 ^2
ID:(15533, 0)
Equilíbrio das forças da mola e gravitacionais
Equação
A equação do movimento é estabelecida com o equilíbrio de forças, o que significa que la força com massa constante (F) é igual a la força elástica (F_k) menos la força gravitacional (F_g):
ID:(15560, 0)
Caso de força massa constante
Equação
No caso em que la massa inercial (m_i) é igual a la massa inicial (m_0),
| m_g = m_i |
a derivada do momento será igual à massa multiplicada pela derivada de la velocidade (v). Dado que a derivada da velocidade é La aceleração instantânea (a), temos que la força com massa constante (F) é igual a
Dado que o momento (p) se define con la massa inercial (m_i) y la velocidade (v),
| p = m_i v |
Si la massa inercial (m_i) é igual a la massa inicial (m_0), então podemos derivar o momento em relação ao tempo e obter la força com massa constante (F):
F=\displaystyle\frac{d}{dt}p=m_i\displaystyle\frac{d}{dt}v=m_ia
Portanto, chegamos à conclusão de que
| F = m_i a |
ID:(10975, 0)
Lei de Hooke
Equação
A relação entre la força elástica (F_k) e a elongação la alongamento (u) é escrita e conhecida como Lei de Hooke. A constante la constante de Hooke (k) é chamada de constante elástica da mola:
ID:(3207, 0)
Força gravitacional
Equação
La força gravitacional (F_g) baseia-se em la massa gravitacional (m_g) do objeto e em uma constante que reflete a intensidade da gravidade na superfície do planeta. Esta última é identificada por la aceleração gravitacional (g), que é igual a 9.8 m/s^2.
Consequentemente, conclui-se que:
ID:(3241, 0)
Equação de movimento da mola
Equação
A equação do movimento é obtida diretamente da equação das forças, onde la força com massa constante (F) é igual a la força elástica (F_k) menos la força gravitacional (F_g):
| F = F_k - F_g |
Esta equação é expressa em relação às diferentes forças envolvidas, incluindo la aceleração instantânea (a), la alongamento de mola (x), la constante de Hooke (k), la massa inercial (m_i), la massa gravitacional (m_g) e la aceleração gravitacional (g), da seguinte forma:
Como la força com massa constante (F) é igual a la força elástica (F_k) menos la força gravitacional (F_g):
| F = F_k - F_g |
Se considerarmos que la força com massa constante (F) com la massa inercial (m_i) e la aceleração instantânea (a) é
| F = m_i a |
e que la força elástica (F_k) é com la constante de Hooke (k) e la alongamento (u) é
| F_k = k x |
e que la força gravitacional (F_g) é com la massa gravitacional (m_g) e la aceleração gravitacional (g)
| F_g = m_g g |
então resulta
| m_i a = k x - m_g g |
ID:(11293, 0)
Igualdade das massas inercial e gravitacional
Equação
As massas que Newton utilizou em seus princípios estão relacionadas à inércia dos corpos, o que leva ao conceito de la massa inercial (m_i).
A lei de Newton, que está ligada à força entre corpos devido às suas massas, está relacionada à gravidade, sendo conhecida como la massa gravitacional (m_g).
Empiricamente, concluiu-se que ambas as massas são equivalentes, e, portanto, definimos
Einstein foi quem questionou essa igualdade e, a partir dessa dúvida, compreendeu por que ambas 'aparecem' iguais em sua teoria da gravidade. Em seu argumento, Einstein explicou que as massas deformam o espaço, e essa deformação do espaço causa uma mudança no comportamento dos corpos. Assim, as massas acabam sendo equivalentes. O conceito revolucionário da curvatura do espaço implica que até mesmo a luz, que não tem massa, é afetada por corpos celestes, contradizendo a teoria da gravitação de Newton. Isso foi demonstrado experimentalmente ao estudar o comportamento da luz durante um eclipse solar. Nessa situação, os feixes de luz são desviados devido à presença do sol, permitindo a observação de estrelas que estão atrás dele.
ID:(12552, 0)
Oscilações com mola
Equação
O produto de la constante de Hooke (k) e la massa inercial (m_i) é denominado la frequência angular da mola (\omega) e é definido como:
ID:(1242, 0)
Frequência angular
Equação
La frequência angular (\omega) é com la período (T) igual a
ID:(12335, 0)
Frequência
Equação
La frequência (\nu) corresponde ao número de vezes que ocorre uma oscilação em um segundo. Já La período (T) é o tempo que uma única oscilação leva. Portanto, o número de oscilações por segundo é:
A frequência é indicada em Hertz (Hz).
ID:(4427, 0)
Solução para posição
Equação
A variável la amplitude de oscilação (x) evolui em relação a o tempo (t) de acordo com a equação de movimento com la frequência angular do oscilador (\omega_0) e la aceleração gravitacional (g) dada por:
| \displaystyle\frac{d v }{d t } = \displaystyle\frac{ k x }{ m_i }- g |
Se assumirmos que la amplitude inicial da oscilação (x_0) e la velocidade inicial do oscilador (v_0) são a solução, podemos escrever:
ID:(15564, 0)
Solução para velocidade
Equação
Para obter la velocidade do oscilador (v), basta derivar la amplitude de oscilação (x) em relação a o tempo (t):
| v =\displaystyle\frac{ d s }{ d t } |
Assim, obtemos com la amplitude inicial da oscilação (x_0), la velocidade inicial (v_0) e la frequência angular do oscilador (\omega_0) que:
ID:(15565, 0)