
Kraft eines Frühlings
Storyboard 
Die von einer Feder erzeugte Kraft ist direkt proportional zu ihrer Dehnung.
Die Proportionalitätskonstante wird als Federkonstante oder Hooke-Konstante bezeichnet. Ebenso wird das Verhältnis dieser Kraft als Hooksches Gesetz bezeichnet.
ID:(1414, 0)
Mechanismen
Iframe
Mechanismen
ID:(15521, 0)
Hookesches Gesetz
Bild
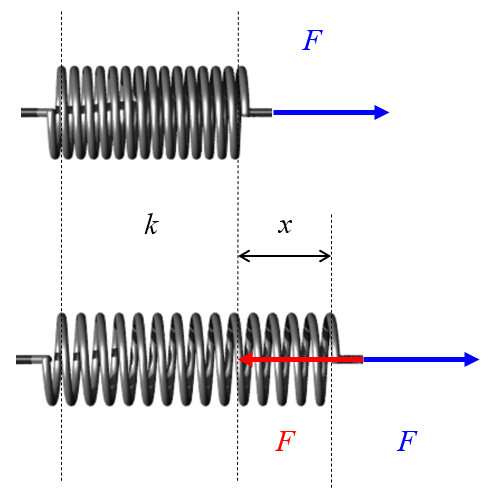
Wenn die erforderliche Kraft gemessen wird, um eine gegebene Dehnung in der Feder zu erreichen, wird festgestellt, dass sie beide proportional sind:

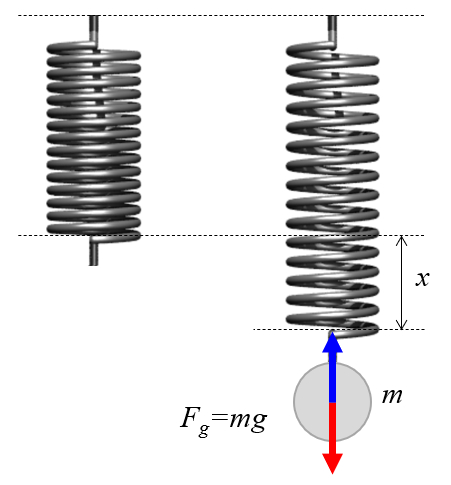
Die Feder wird vertikal aufgehängt und bekannte Gewichte werden hinzugefügt. Die resultierende Dehnung wird gemessen und ein Diagramm von Kraft gegen Dehnung wird erstellt. Die Steigung dieser Beziehung, bekannt als Federkonstante oder Hooke'sche Konstante, hängt von den Eigenschaften der Feder ab.
Die Linearität dieser Beziehung ermöglicht es, Federn als Methode zur Messung von Kräften zu verwenden.
Kraft kann mithilfe einer Feder gemessen werden, indem eine Skala proportional zur Dehnung erstellt wird, die direkt auf die zugehörige Kraft hinweist.
Das Instrument zur Messung von Kräften mithilfe einer Feder wird als Dynamometer bezeichnet (die 'Dina' ist die Einheit der Kraft im cgs-System - Zentimeter, Gramm, Sekunden - so dass 10^5 Dinas einem Newton entsprechen).
ID:(11530, 0)
Untersuchung des Federverhaltens
Bild
Um zu untersuchen, wie sich die Feder dehnt, kann sie vertikal aufgehängt und schrittweise mit bekannten Gewichten belastet werden.
ID:(12528, 0)
Modell
Top
Parameter
Variablen
Berechnungen
Berechnungen
Berechnungen
Gleichungen
F = F_k - F_g
F = F_k - F_g
F = m_i a
F = m_i * a
F_g = m_g g
F_g = m_g * g
F_k = k x
F_k = k * u
m_g = m_i
m_g = m_i
m_i a = k x - m_g g
m_i * a = k * x - m_g * g
\nu =\displaystyle\frac{1}{ T }
nu =1/ T
\omega = 2 \pi \nu
omega = 2* pi * nu
\omega = \displaystyle\frac{2 \pi }{ T }
omega = 2* pi / T
\omega_0 ^2=\displaystyle\frac{ k }{ m_i }
omega_0 ^2 = k / m_i
v = - x_0 \omega \sin \omega t + v_0 \cos \omega t
v = - x_0 * omega_0 *sin( omega_0 * t )+ v_0 *cos( omega_0 * t )
x = x_0 \cos \omega t + \displaystyle\frac{ v_0 }{ \omega }\sin \omega t + \displaystyle\frac{ g }{ \omega ^2}
x = x_0 *cos( omega_0 * t )+ v_0 *sin( omega_0 * t )/ omega_0 + g / omega_0 ^2
ID:(15533, 0)
Gleichgewicht von Feder- und Gravitationskräften
Gleichung
Die Bewegungsgleichung wird durch das Gleichgewicht der Kräfte festgelegt, was bedeutet, dass die Kraft mit konstanter Masse (F) gleich die Federkraft (F_k) minus die Schwerkraft (F_g) ist:
Si se cuelga una masa generando una fuerza
| F_g = m_g g |
a un resorte este último se dilata hasta generar una fuerza que es
que iguala a la fuerza gravitacional que es
| F = F_k - F_g |
ID:(15560, 0)
Kraftfall konstante Masse
Gleichung
Im Fall, dass die Träge Masse (m_i) gleich die Anfangsmasse (m_0) ist,
| m_g = m_i |
wird die Ableitung des Impulses gleich der Masse mal der Ableitung von die Geschwindigkeit (v) sein. Da die Ableitung der Geschwindigkeit die Augenblickliche Beschleunigung (a) ist, ergibt sich, dass die Kraft mit konstanter Masse (F) ist
Da der Moment (p) mit die Träge Masse (m_i) und die Geschwindigkeit (v) definiert ist,
| p = m_i v |
Wenn die Träge Masse (m_i) gleich die Anfangsmasse (m_0) ist, können wir den Impuls nach der Zeit ableiten und die Kraft mit konstanter Masse (F) erhalten:
F=\displaystyle\frac{d}{dt}p=m_i\displaystyle\frac{d}{dt}v=m_ia
Daher kommen wir zu dem Schluss, dass
| F = m_i a |
ID:(10975, 0)
Hookes Gesetz
Gleichung
Die Beziehung zwischen die Federkraft (F_k) und der Dehnung die Verlängerung (u) wird als Hooke'sches Gesetz ausgedrückt und bezeichnet. Die Konstante die Hookes Konstante (k) wird als die Federkonstante bezeichnet:
ID:(3207, 0)
Schwerkraft
Gleichung
Die Schwerkraft (F_g) basiert auf die Gravitationsmasse (m_g) des Objekts und auf einer Konstanten, die die Intensität der Gravitation an der Oberfläche des Planeten widerspiegelt. Letztere wird durch die Gravitationsbeschleunigung (g) identifiziert, was 9.8 m/s^2 entspricht.
Daraus folgt, dass:
ID:(3241, 0)
Federbewegungsgleichung
Gleichung
Die Bewegungsgleichung wird direkt aus der Kräftegleichung abgeleitet, wobei die Kraft mit konstanter Masse (F) gleich die Federkraft (F_k) minus die Schwerkraft (F_g) ist:
| F = F_k - F_g |
Diese Gleichung wird in Bezug auf die verschiedenen beteiligten Kräfte ausgedrückt, einschließlich die Augenblickliche Beschleunigung (a), die Verlängerung der Feder (x), die Hookes Konstante (k), die Träge Masse (m_i), die Gravitationsmasse (m_g) und die Gravitationsbeschleunigung (g), wie folgt:
Da die Kraft mit konstanter Masse (F) gleich die Federkraft (F_k) minus die Schwerkraft (F_g) ist:
| F = F_k - F_g |
Wenn man bedenkt, dass die Kraft mit konstanter Masse (F) mit die Träge Masse (m_i) und die Augenblickliche Beschleunigung (a) ist
| F = m_i a |
und die Federkraft (F_k) mit die Hookes Konstante (k) und die Verlängerung (u) ist
| F_k = k x |
und dass die Schwerkraft (F_g) mit die Gravitationsmasse (m_g) und die Gravitationsbeschleunigung (g) ist
| F_g = m_g g |
also erhalten wir
| m_i a = k x - m_g g |
ID:(11293, 0)
Gleichheit von träger und schwerer Masse
Gleichung
Die Massen, die Newton in seinen Prinzipien verwendete, sind mit der Trägheit der Körper verbunden, was zum Konzept von die Träge Masse (m_i) führt.
Das nach Newton benannte Gesetz, das die Kraft zwischen Körpern aufgrund ihrer Massen beschreibt, ist mit der Gravitation verbunden und wird daher als die Gravitationsmasse (m_g) bezeichnet.
Empirisch wurde festgestellt, dass beide Massen äquivalent sind, und daher definieren wir
Einstein war derjenige, der diese Gleichheit in Frage stellte und von diesem Zweifel aus verstand, warum beide in seiner Gravitationstheorie "gleich erscheinen". In seinem Argument erklärte Einstein, dass Massen den Raum verformen, und diese Raumverformung führt zu einer Veränderung des Verhaltens von Körpern. Auf diese Weise erweisen sich die Massen als äquivalent. Das revolutionäre Konzept der Raumkrümmung impliziert, dass selbst Licht, das keine Masse hat, von Himmelskörpern beeinflusst wird, was der Gravitationstheorie von Newton widerspricht. Dies wurde experimentell durch die Untersuchung des Verhaltens von Licht während einer Sonnenfinsternis nachgewiesen. In dieser Situation werden Lichtstrahlen aufgrund der Anwesenheit der Sonne abgelenkt, was es ermöglicht, Sterne hinter ihr zu beobachten.
ID:(12552, 0)
Schwingungen mit einer Feder
Gleichung
Das Produkt von die Hookes Konstante (k) und die Träge Masse (m_i) wird als die Frecuencia angular del resorte (\omega) bezeichnet und wie folgt definiert:
ID:(1242, 0)
Winkelfrequenz
Gleichung
Die Winkelfrequenz (\omega) ist mit die Zeit (T) gleich
ID:(12335, 0)
Relación frecuencia angular - frecuencia
Gleichung
Como la frecuencia angular es con pi rad, winkelfrequenz rad/s und zeit s igual a
| \omega = \displaystyle\frac{2 \pi }{ T } |
y la frecuencia con frequenz Hz und zeit s igual a
| \nu =\displaystyle\frac{1}{ T } |
se tiene que con frequenz Hz und zeit s igual a
ID:(12338, 0)
Frequenz
Gleichung
Die Frequenz (\nu) entspricht der Anzahl der Schwingungen, die innerhalb einer Sekunde auftreten. Die Zeit (T) repräsentiert die Zeit, die für eine einzelne Schwingung benötigt wird. Daher ist die Anzahl der Schwingungen pro Sekunde:
Die Frequenz wird in Hertz (Hz) angegeben.
ID:(4427, 0)
Lösung für Position
Gleichung
Die Variable die Schwingungsamplitude (x) entwickelt sich in Bezug auf der Zeit (t) gemäß der Bewegungsgleichung mit die Winkelfrequenz des Oszillators (\omega_0) und die Gravitationsbeschleunigung (g), gegeben durch:
| \displaystyle\frac{d v }{d t } = \displaystyle\frac{ k x }{ m_i }- g |
Wenn wir annehmen, dass die Anfangsamplitude der Schwingung (x_0) und die Anfangsgeschwindigkeit des Oszillators (v_0) die Lösung sind, können wir schreiben:
ID:(15564, 0)
Lösung für Geschwindigkeit
Gleichung
Um die Oszillatorgeschwindigkeit (v) zu erhalten, müssen wir einfach die Schwingungsamplitude (x) nach der Zeit (t) ableiten:
| v =\displaystyle\frac{ d s }{ d t } |
Daher ergibt sich mit die Anfangsamplitude der Schwingung (x_0), die Anfangsgeschwindigkeit (v_0) und die Winkelfrequenz des Oszillators (\omega_0):
ID:(15565, 0)