
Fuerza de un resorte
Storyboard 
La fuerza generada por un resorte es directamente proporcional a su elongación.
La constante de proporcionalidad se conoce como la constante del resorte o constante de Hooke. De igual manera, la relación de esta fuerza se denomina Ley de Hooke.
ID:(1414, 0)
Mecanismos
Iframe
Mecanismos
ID:(15521, 0)
El resorte
Imagen
Un resorte es un alambre retorcido que puede estirarse o comprimirse.
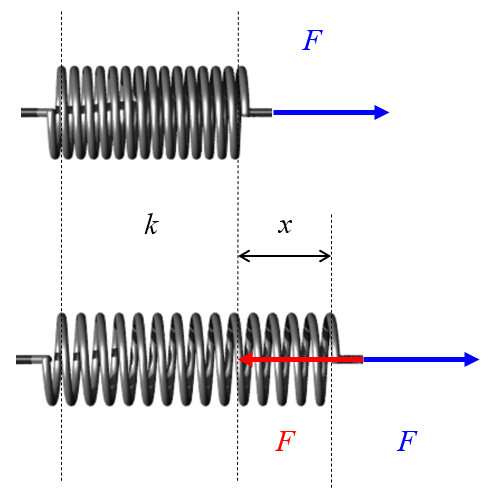
Cuando se realizan estas deformaciones, el resorte genera una fuerza que se opone al movimiento.
ID:(12527, 0)
Ley de Hooke
Imagen
Si se mide la fuerza requerida para lograr una determinada elongación en el resorte, se observará que ambas son proporcionales:

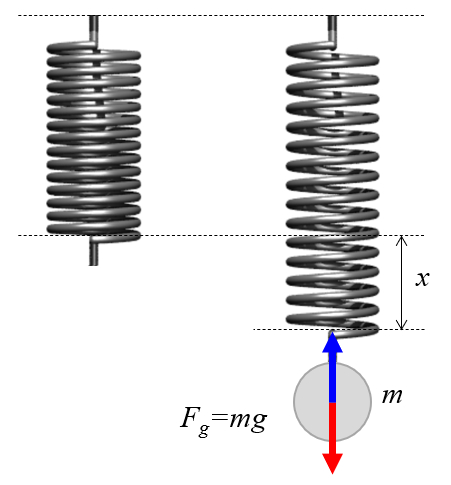
Se cuelga el resorte en forma vertical y se van añadiendo masas de peso conocido. Luego se mide la elongación resultante y se grafica la fuerza frente a la elongación. La pendiente de esta relación, conocida como constante de elasticidad del resorte o constante de Hooke, depende de las propiedades del resorte.
La linealidad de esta relación permite utilizar los resortes como un método para medir fuerzas.
La fuerza puede medirse utilizando un resorte, estableciendo una escala proporcional a la elongación que indique directamente la fuerza asociada.
El instrumento utilizado para medir la fuerza mediante un resorte se llama dinamómetro (la 'dina' es la unidad de fuerza en el sistema cgs - centímetros, gramos, segundos - de tal manera que 10^5 dinas equivalen a un Newton).
ID:(11530, 0)
Estudio del comportamiento del resorte
Imagen
Para investigar cómo se estira el resorte, se puede suspender verticalmente y añadir pesos conocidos gradualmente.
ID:(12528, 0)
Modelo
Top
Parámetros
Variables
Cálculos
Cálculos
Cálculos
Ecuaciones
F = F_k - F_g
F = F_k - F_g
F = m_i a
F = m_i * a
F_g = m_g g
F_g = m_g * g
F_k = k x
F_k = k * u
m_g = m_i
m_g = m_i
m_i a = k x - m_g g
m_i * a = k * x - m_g * g
\nu =\displaystyle\frac{1}{ T }
nu =1/ T
\omega = 2 \pi \nu
omega = 2* pi * nu
\omega = \displaystyle\frac{2 \pi }{ T }
omega = 2* pi / T
\omega_0 ^2=\displaystyle\frac{ k }{ m_i }
omega_0 ^2 = k / m_i
v = - x_0 \omega \sin \omega t + v_0 \cos \omega t
v = - x_0 * omega_0 *sin( omega_0 * t )+ v_0 *cos( omega_0 * t )
x = x_0 \cos \omega t + \displaystyle\frac{ v_0 }{ \omega }\sin \omega t + \displaystyle\frac{ g }{ \omega ^2}
x = x_0 *cos( omega_0 * t )+ v_0 *sin( omega_0 * t )/ omega_0 + g / omega_0 ^2
ID:(15533, 0)
Equilibrio de fuerzas de resorte y gravitación
Ecuación
La ecuación de movimiento se establece con el equilibrio de fuerzas que significa que la fuerza con masa constante (F) es igual a la fuerza elástica (F_k) menos la fuerza gravitacional (F_g):
Si se cuelga una masa generando una fuerza
| F_g = m_g g |
a un resorte este último se dilata hasta generar una fuerza que es
que iguala a la fuerza gravitacional que es
| F = F_k - F_g |
ID:(15560, 0)
Fuerza caso masa constante
Ecuación
En el caso en que la masa inercial (m_i) es igual a la masa inicial (m_0),
| m_g = m_i |
la derivada del momento será igual a la masa multiplicada por la derivada de la velocidad (v). Dado que la derivada de la velocidad es la aceleración instantanea (a), obtenemos que la fuerza con masa constante (F) es igual a
Dado que el momento (p) se define con la masa inercial (m_i) y la velocidad (v),
| p = m_i v |
Si la masa inercial (m_i) es igual a la masa inicial (m_0), entonces podemos derivar el momento respecto al tiempo y obtener la fuerza con masa constante (F):
F=\displaystyle\frac{d}{dt}p=m_i\displaystyle\frac{d}{dt}v=m_ia
Por lo tanto, llegamos a la conclusión de que
| F = m_i a |
ID:(10975, 0)
Ley de Hooke
Ecuación
La relación entre la fuerza elástica (F_k) y la elongación la elongación (u) se expresa y se conoce como la Ley de Hooke. La constante la constante de Hooke (k) se denomina la constante de elasticidad del resorte:
ID:(3207, 0)
Fuerza gravitacional
Ecuación
La fuerza gravitacional (F_g) se basa en la masa gravitacional (m_g) del objeto y en una constante que refleja la intensidad de la gravedad en la superficie del planeta. Esta última es identificada por la aceleración gravitacional (g), que es igual a 9.8 m/s^2.
En consecuencia, se concluye que:
ID:(3241, 0)
Ecuación de movimiento del resorte
Ecuación
La ecuación de movimiento se obtiene directamente de la ecuación de las fuerzas, donde la fuerza con masa constante (F) es igual a la fuerza elástica (F_k) menos la fuerza gravitacional (F_g):
| F = F_k - F_g |
Esta ecuación se expresa en función de las distintas fuerzas involucradas, incluyendo la aceleración instantanea (a), la elongación del resorte (x), la constante de Hooke (k), la masa inercial (m_i), la masa gravitacional (m_g) y la aceleración gravitacional (g) de la siguiente manera:
Given that la fuerza con masa constante (F) is equal to la fuerza elástica (F_k) minus la fuerza gravitacional (F_g):
| F = F_k - F_g |
If we consider that la fuerza con masa constante (F) with la masa inercial (m_i) and la aceleración instantanea (a) is
| F = m_i a |
and la fuerza elástica (F_k) is with la constante de Hooke (k) and la elongación (u) is
| F_k = k x |
and that la fuerza gravitacional (F_g) is with la masa gravitacional (m_g) and la aceleración gravitacional (g)
| F_g = m_g g |
which results in
| m_i a = k x - m_g g |
ID:(11293, 0)
Igualdad de masa inercial y gravitacional
Ecuación
Las masas que Newton utilizó en sus principios están relacionadas con la inercia de los cuerpos, lo que lleva al concepto de la masa inercial (m_i).
La ley de Newton que se vincula con la fuerza entre cuerpos debido a sus masas está relacionada con la gravedad, por lo que se conoce como la masa gravitacional (m_g).
De manera empírica, se ha concluido que ambas masas son equivalentes, y por lo tanto, definimos
Einstein fue quien cuestionó esta igualdad y, a partir de esa duda, comprendió por qué ambas 'aparecen' iguales en su teoría de la gravedad. En su argumento, Einstein explicó que las masas deforman el espacio, y esta deformación del espacio provoca un cambio en el comportamiento de los cuerpos. De esta manera, las masas resultan ser equivalentes. El concepto revolucionario de la curvatura del espacio implica que incluso la luz, que carece de masa, se ve afectada por los cuerpos celestes, lo que contradice la teoría de la gravitación de Newton. Esto se demostró experimentalmente al estudiar el comportamiento de la luz durante un eclipse solar. En esta situación, los haces de luz se desvían debido a la presencia del sol, lo que permite observar estrellas que se encuentran detrás de él.
ID:(12552, 0)
Oscilaciones con un resorte
Ecuación
El producto de la constante de Hooke (k) y la masa inercial (m_i) se denomina la frecuencia angular del resorte (\omega) y se define como:
ID:(1242, 0)
Frecuencia angular
Ecuación
La frecuencia angular (\omega) es con la período (T) igual a
ID:(12335, 0)
Relación frecuencia angular - frecuencia
Ecuación
Como la frecuencia angular es con frecuencia angular rad/s, período s y pi rad igual a
| \omega = \displaystyle\frac{2 \pi }{ T } |
y la frecuencia con frecuencia Hz y período s igual a
| \nu =\displaystyle\frac{1}{ T } |
se tiene que con frecuencia Hz y período s igual a
ID:(12338, 0)
Frecuencia
Ecuación
La frecuencia (\nu) representa la cantidad de oscilaciones que ocurren en un segundo. Mientras tanto, la período (T) es el tiempo que tarda una sola oscilación. Por lo tanto, el número de oscilaciones por segundo es:
La frecuencia se expresa en Hertz (Hz).
ID:(4427, 0)
Solución para la posición
Ecuación
La variable la amplitud de la oscilación (x) evoluciona en el tiempo (t) según la ecuación de movimiento con la frecuencia angular del oscilador (\omega_0) y la aceleración gravitacional (g), expresada como:
| \displaystyle\frac{d v }{d t } = \displaystyle\frac{ k x }{ m_i }- g |
Si suponemos que la amplitud inicial de la oscilación (x_0) y la velocidad inicial del oscilador (v_0) son la solución, podemos escribirlo como:
ID:(15564, 0)
Solución para la velocidad
Ecuación
Para obtener la velocidad del oscilador (v), simplemente hay que derivar la amplitud de la oscilación (x) con respecto a el tiempo (t), lo que nos da:
| v =\displaystyle\frac{ d s }{ d t } |
Por lo tanto, con la amplitud inicial de la oscilación (x_0), la velocidad inicial (v_0) y la frecuencia angular del oscilador (\omega_0), obtenemos:
ID:(15565, 0)