
Rollkontrolle
Storyboard 
Die Rollsteuerung ist der Mechanismus, der es dem Flugzeug ermöglicht, sich um seine Längsachse zu drehen, wobei eine Tragfläche angehoben und die andere gesenkt wird. Diese Steuerung wird durch eine Auftriebsdifferenz erreicht, die mithilfe der Querruder erzeugt wird, welche sich an den Flügelspitzen befinden. Diese Auftriebsdifferenz erzeugt ein Drehmoment, das das Flugzeug um eine imaginäre Achse entlang des Rumpfes, bekannt als Rollachse, rollen lässt.
ID:(2114, 0)
Rollkontrolle
Konzept
Um eine Rollbewegung um ihre Längsachse auszuführen, verwendet das Flugzeug die Querruder. Diese erzeugen ein eine Kraft auf die Querruder ($F_a$), das in Kombination mit eine Abstand Schwerpunkt und Querruder ($d_a$) eine ein Von den Querrudern erzeugtes Drehmoment ($T_a$) induziert. Die Querruder befinden sich an den Spitzen der Flügel des Flugzeugs, um ihre die Abstand Schwerpunkt und Querruder ($d_a$) relativ zum Schwerpunkt zu maximieren und eine größere eine Entfernung Schwerpunkt und Aufzüge ($d_e$) zu erreichen.
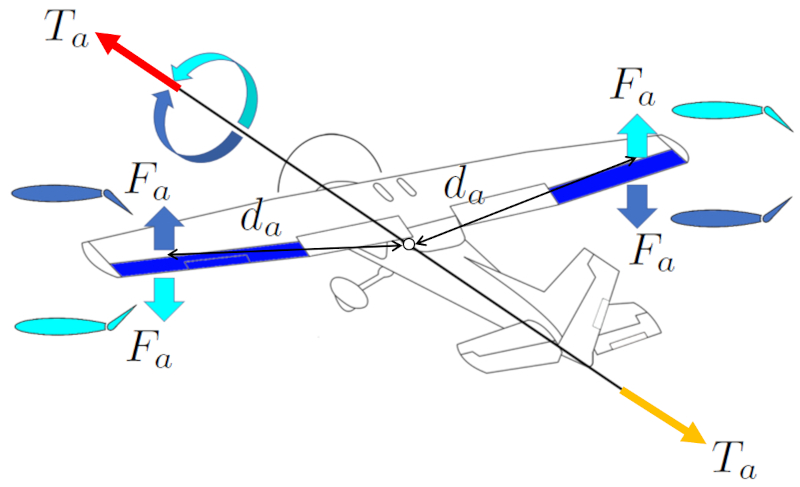
Die Querruder arbeiten asymmetrisch, was bedeutet, dass, wenn das Querruder des rechten Flügels Auftrieb nach oben erzeugt, das Querruder des linken Flügels das Gegenteil tut, und umgekehrt. Auf diese Weise erzeugen diese Kräfte ein Drehmoment, das es dem Flugzeug ermöglicht, im Uhrzeigersinn oder gegen den Uhrzeigersinn zu drehen.
Das Ziel der Rotation besteht darin, mit der Auftriebskraft eine Kraft zu erzeugen, die orthogonal zur zentralen Achse steht und zu einer Kurve im Flugzeug führt. Dies verstärkt die Wirkung des Seitenruders und unterstützt das Drehmanöver des Flugzeugs. Tatsächlich ist dies die Art und Weise, wie Vögel ihre Drehmanöver durchführen, da sie kein Seitenruder haben.
Um das Drehmanöver auszuführen, verwendet der Pilot das Steuerhorn, das eine Art Lenkrad ist und sich in dieselbe Richtung wie das Flugzeug dreht. In anderen Fällen, wie bei den Steuerknüppeln in Airbus-Flugzeugen, gibt es kein Lenkrad, und der Steuerknüppel wird in die gewünschte Richtung geneigt, um die Kurve zu machen.
Eine der Herausforderungen beim Ausführen einer Rotation um die zentrale Achse des Flugzeugs besteht darin, dass die Auftriebskraft verwendet wird, um die Flugbahn abzuweichen, was zu einem Abfall des Auftriebs führt. Das bedeutet, dass das Flugzeug und der Vogel während eines Drehmanövers tendieren, an Höhe zu verlieren, es sei denn, die Leistung wird erhöht.
ID:(15160, 0)

Trägheitsmoment beim Rollen
Beschreibung
Der Trägheitsmoment der Achse der Ebene ($I_a$) kann als das Trägheitsmoment eines rechtwinkligen Parallelepipeds angenähert werden, das den Flügel des Flugzeugs darstellt und sich um eine Achse dreht, die parallel zur Flügelbreite verläuft:
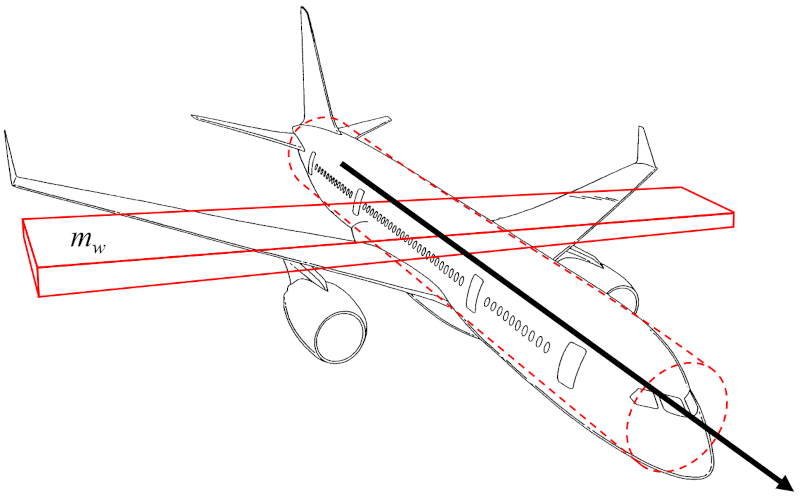
Da der Rumpf des Flugzeugs relativ schmal ist, kann in einer ersten Näherung das Trägheitsmoment des Zylinders, der ihn darstellt, vernachlässigt werden. Somit ist der Trägheitsmoment der Achse der Ebene ($I_a$) proportional zu die Flügelmasse ($m_w$) und dem Quadrat von die Spannweite der Flügel ($L$).
Daher wird der Trägheitsmoment der Achse der Ebene ($I_a$) wie folgt aus die Flügelmasse ($m_w$) und die Spannweite der Flügel ($L$) berechnet:
ID:(15992, 0)
Flügelmasse
Beschreibung
Die Flügelmasse ($m_w$) kann als das Volumen eines rechtwinkligen Parallelepipeds multipliziert mit der Dichte des Flugzeugs approximiert werden:
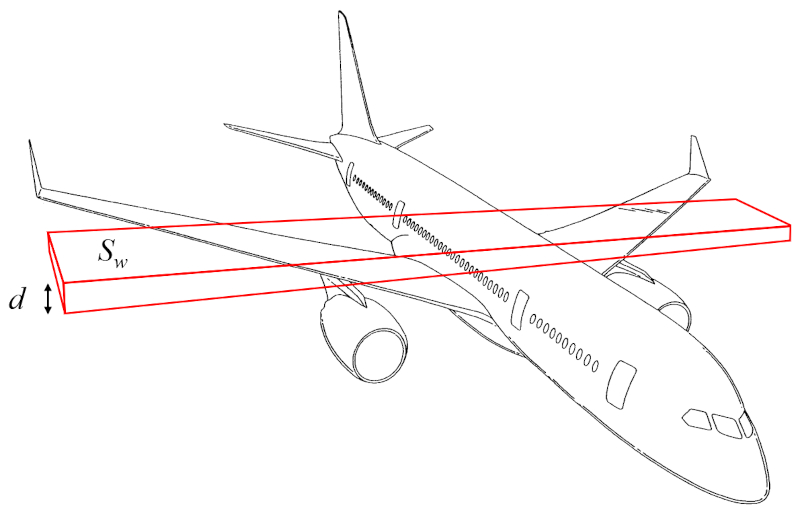
Das Volumen kann somit aus die Oberfläche, die Auftrieb erzeugt ($S_w$) und die Flügelhöhe ($d$) berechnet werden.
Daher wird die Flügelmasse ($m_w$) unter Verwendung von der Dichte des Flugzeugkörpers ($\rho_a$), die Oberfläche, die Auftrieb erzeugt ($S_w$) und die Flügelhöhe ($d$) wie folgt bestimmt:
| $ m_w = \rho_a S_w d $ |
ID:(15989, 0)
Kraft die das Rollen erzeugt
Gleichung
ID:(15164, 0)
Rolldrehmoment
Gleichung
ID:(15167, 0)
Auftriebskraft
Gleichung
Um einen höheren Druck unterhalb als oberhalb des Flügels zu erzeugen und Auftrieb zu generieren, wird das Bernoulli-Prinzip angewendet und die fehlende Energieerhaltungsdichte durch ein Koeffizient Fahrstuhl ($C_L$) korrigiert. Der Druck über dem Flügel, die Auftriebskraft ($F_L$), kann unter Verwendung von die Dichte ($\rho$), die Oberfläche, die Auftrieb erzeugt ($S_w$), der Koeffizient Fahrstuhl ($C_L$) und die Geschwindigkeit in Bezug auf das Medium ($v$) mithilfe der folgenden Formel geschätzt werden:
Die Auftriebskraft ($F_L$), zusammen mit die Spannweite der Flügel ($L$), die Dichte ($\rho$), der Flügel-Höchstgeschwindigkeitsfaktor ($c_t$), der Flügelbodengeschwindigkeitsfaktor ($c_b$), die Obere Flügellänge ($l_t$), die Länge des unteren Flügels ($l_b$) und die Geschwindigkeit in Bezug auf das Medium ($v$), findet sich in
| $ F_L = \rho L ( c_b l_b - c_t l_t ) v ^2$ |
Wenn wir die Oberfläche, die Auftrieb erzeugt ($S_w$) betrachten, gegeben durch die Spannweite der Flügel ($L$), die Obere Flügellänge ($l_t$) und die Länge des unteren Flügels ($l_b$),
| $ S_w = \displaystyle\frac{1}{2} L ( l_t + l_b )$ |
und für der Koeffizient Fahrstuhl ($C_L$), definiert als
| $ C_L = 4\displaystyle\frac{ c_t l_t - c_b l_b }{ l_t + l_b }$ |
erhalten wir
| $ F_L =\displaystyle\frac{1}{2} \rho S_w C_L v ^2$ |
ID:(4417, 0)
Auftriebsbeiwert
Gleichung
Aus Messungen geht hervor, dass der Auftriebskoeffizient $C_L$ proportional zum Anstellwinkel $\alpha$ ist:
Nach einem bestimmten Winkel nimmt die Kurve ab und erreicht schließlich den Wert Null. Dies liegt daran, dass über diesem kritischen Winkel die Wirbel vollständig die obere Fläche des Flügels bedecken und somit der Auftrieb verloren geht. Dieses Phänomen wird als \"Strömungsabriss\" bezeichnet.
ID:(4441, 0)
Trägheitsmoment beim Rollen
Gleichung
Der Trägheitsmoment der Achse der Ebene ($I_a$) wird aus die Flügelmasse ($m_w$) und die Spannweite der Flügel ($L$) berechnet, wie folgt:
ID:(15986, 0)
Flügelmasse
Gleichung
Die Flügelmasse ($m_w$) wird aus der Dichte des Flugzeugkörpers ($\rho_a$), die Oberfläche, die Auftrieb erzeugt ($S_w$) und die Flügelhöhe ($d$) berechnet, wie folgt:
ID:(15984, 0)
Querruder-Kraftarm
Gleichung
Die Abstand Schwerpunkt und Querruder ($d_a$) wird als die Hälfte von die Spannweite der Flügel ($L$) definiert, dargestellt wie folgt:
ID:(15995, 0)
Verhältnis von Dicke zu Spannweite
Gleichung
Der Verhältnis von Dicke zu Spannweite ($\gamma_d$) wird als das Verhältnis von die Flügelhöhe ($d$) zu die Spannweite der Flügel ($L$) definiert, wie folgt dargestellt:
ID:(15976, 0)