
Controle de rolagem
Storyboard 
O controle de rolamento é o mecanismo que permite à aeronave girar em torno de seu eixo longitudinal, elevando uma asa enquanto abaixa a outra. Esse controle é obtido gerando uma diferença de sustentação através dos ailerons, localizados nas extremidades das asas. Essa diferença de sustentação cria um torque, responsável por fazer a aeronave rolar ao redor de um eixo imaginário ao longo do fuselagem, conhecido como eixo de rolamento.
ID:(2114, 0)
Controle de rolagem
Conceito
Para realizar um rolamento em torno do seu eixo, a aeronave utiliza os ailerons. Estes geram uma força nos ailerons (F_a) que, em conjunto com uma centro de distância de massa e ailerons (d_a), induzem um torque gerado pelos ailerons (T_a). Os ailerons estão localizados nas pontas das asas da aeronave para maximizar sua la centro de distância de massa e ailerons (d_a) em relação ao centro de massa e obter uma maior uma centro de distância de massa e elevadores (d_e).
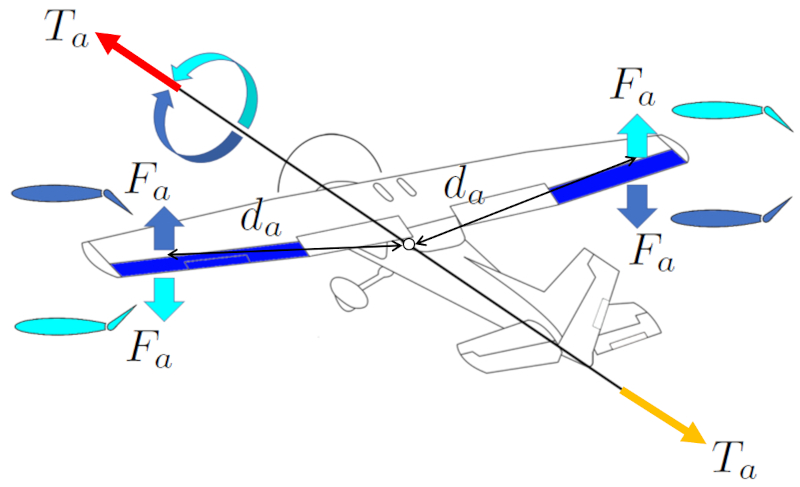
Os ailerons operam de maneira assimétrica, o que significa que se o aileron da asa direita gera sustentação para cima, o da asa esquerda faz o oposto, e vice-versa. Dessa forma, essas forças geram um torque que permite girar no sentido horário ou anti-horário.
O objetivo da rotação é gerar, com a força de sustentação, uma força ortogonal ao eixo central, resultando em uma curva na aeronave. Isso reforça a ação do leme, auxiliando na manobra de viragem da aeronave. De fato, essa é a forma como as aves realizam suas manobras de viragem, já que não possuem um leme.
Para realizar a manobra de viragem, o piloto utiliza o controle de coluna, que possui um volante que gira na mesma direção que a aeronave. Em outros casos, como no joystick das aeronaves Airbus, não há um volante, e o joystick é inclinado na direção desejada para realizar a curva.
Um dos problemas que surgem ao realizar uma rotação em torno do eixo central da aeronave é que a força de sustentação é utilizada para desviar a trajetória, resultando em uma diminuição da sustentação. Isso significa que, durante uma manobra de viragem, a aeronave e a ave tendem a perder altitude a menos que a potência seja aumentada.
ID:(15160, 0)

Momento de inércia para rolar
Descrição
O momento de inércia do eixo do avião (I_a) pode ser aproximado como o momento de inércia de um paralelepípedo retangular que representa a asa da aeronave, rotacionando em torno de um eixo paralelo à sua largura:
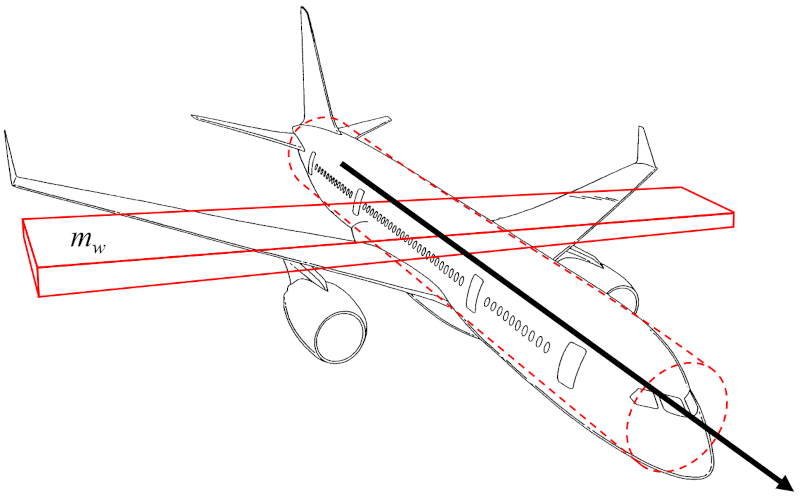
Como o corpo da aeronave é relativamente estreito, o momento de inércia do cilindro que o representa pode ser desprezado em uma primeira aproximação. Assim, o momento de inércia do eixo do avião (I_a) é proporcional a la massa da asa (m_w) e ao quadrado de la envergadura das asas (L).
Portanto, o momento de inércia do eixo do avião (I_a) é calculado a partir de la massa da asa (m_w) e la envergadura das asas (L), da seguinte forma:
ID:(15992, 0)
Massa da asa
Descrição
La massa da asa (m_w) pode ser aproximado como o volume de um paralelepípedo retângulo multiplicado pela densidade da aeronave:
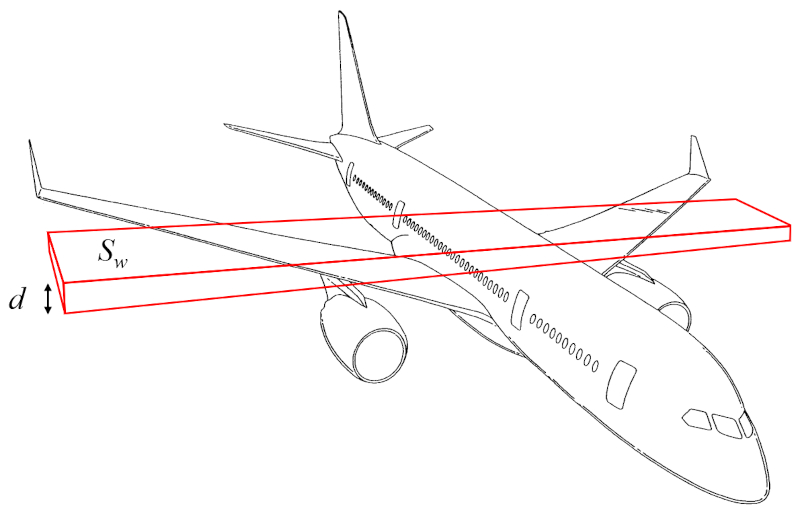
O volume, portanto, pode ser calculado a partir de la superfície que gera sustentação (S_w) e la altura da asa (d).
Assim, la massa da asa (m_w) é determinado utilizando o densidade corporal da aeronave (\rho_a), la superfície que gera sustentação (S_w) e la altura da asa (d), da seguinte maneira:
| m_w = \rho_a S_w d |
ID:(15989, 0)
Força gerada pelo rolamento
Equação
ID:(15164, 0)
Torque de rolamento
Equação
ID:(15167, 0)
Sustentação
Equação
Para gerar uma pressão maior abaixo do que acima da asa e gerar sustentação, utiliza-se o princípio de Bernoulli, corrigindo a falta de conservação da densidade de energia com um coeficiente de elevação (C_L). A pressão sobre a asa, la força de elevação (F_L), pode ser estimada usando la densidade (\rho), la superfície que gera sustentação (S_w), o coeficiente de elevação (C_L) e la velocidade em relação ao meio (v) através da seguinte fórmula:
La força de elevação (F_L), juntamente com la envergadura das asas (L), la densidade (\rho), o fator de velocidade máxima da asa (c_t), o fator de velocidade inferior da asa (c_b), la comprimento superior da asa (l_t), la comprimento inferior da asa (l_b) e la velocidade em relação ao meio (v), encontra-se em
| F_L = \rho L ( c_b l_b - c_t l_t ) v ^2 |
Se considerarmos la superfície que gera sustentação (S_w), definido por la envergadura das asas (L), la comprimento superior da asa (l_t) e la comprimento inferior da asa (l_b),
| S_w = \displaystyle\frac{1}{2} L ( l_t + l_b ) |
e para o coeficiente de elevação (C_L), definido como
| C_L = 4\displaystyle\frac{ c_t l_t - c_b l_b }{ l_t + l_b } |
obtemos
| F_L =\displaystyle\frac{1}{2} \rho S_w C_L v ^2 |
ID:(4417, 0)
Constante de elevação
Equação
A partir de medições, conclui-se que o coeficiente de sustentação C_L é proporcional ao ângulo de ataque \alpha:
Após um certo ângulo, a curva diminui até chegar a zero. Isso ocorre porque acima desse ângulo crítico, os redemoinhos cobrem completamente a superfície superior da asa, levando à perda de sustentação. Esse fenômeno é conhecido como \"stall\" (estol em português).
ID:(4441, 0)
Momento de inércia para rolar
Equação
O momento de inércia do eixo do avião (I_a) é calculado a partir de la massa da asa (m_w) e ($$)6337
ID:(15986, 0)
Massa da asa
Equação
La massa da asa (m_w) é calculado a partir de o densidade corporal da aeronave (\rho_a), la superfície que gera sustentação (S_w) e la altura da asa (d), da seguinte forma:
ID:(15984, 0)
Braço de força do aileron
Equação
La centro de distância de massa e ailerons (d_a) é definido como a metade de la envergadura das asas (L), expressado da seguinte maneira:
ID:(15995, 0)
Relação espessura/espaço
Equação
O relação espessura/espaço (\gamma_d) é definido como a proporção de la altura da asa (d) para la envergadura das asas (L), representada da seguinte maneira:
ID:(15976, 0)