
Movimento Oceânico, drifters
Storyboard 
O movimento na superfície dos oceanos surge da interação com a atmosfera e é condicionado às correntes mais profundas (com mais de 15 metros). Em uma primeira abordagem, pode ser considerado como um fluxo a uma velocidade constante com vórtices estáveis ou arrastados por ele.
ID:(1519, 0)
Mecanismos
Iframe
Mecanismos
ID:(15449, 0)
Rotação como translação, posição
Conceito
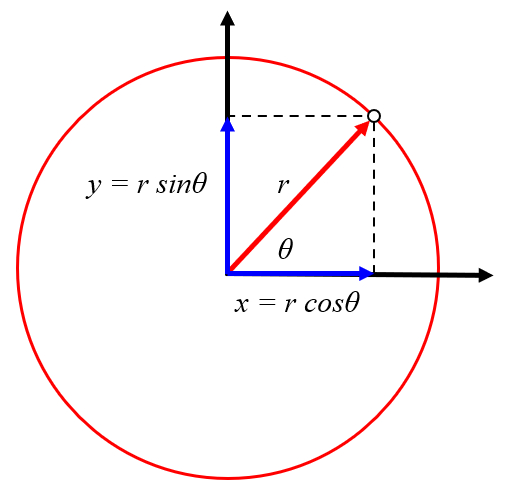
O movimento de rotação pode ser expresso como deslocamento nas direções x e y com valores de la distância do objeto ao centro do vórtice (r) e o ângulo do objeto no vórtice (\theta_w), respectivamente. Com as coordenadas la posição x do centro do vórtice (X) e la posição y do centro do vórtice (Y), obtemos que la posição x do objeto (x) é:
| x = X + r \cos \theta_w |
e para la posição y do objeto (y):
| y = Y + r \sin \theta_w |
ID:(11490, 0)
Rotação como translação, velocidade
Imagem
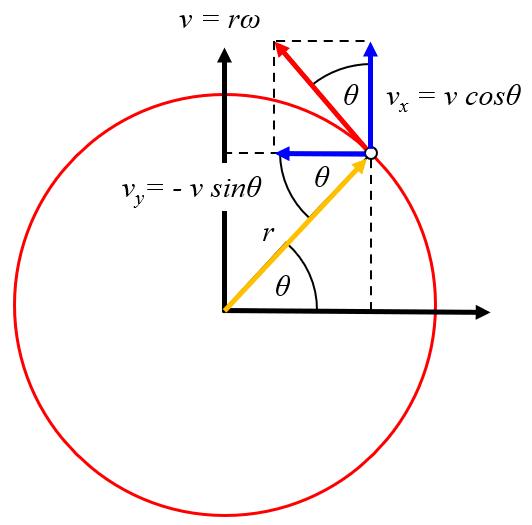
O movimento de rotação pode ser expresso como deslocamento nas direções x e y, com velocidades de ($$) e ($$), respectivamente. Com as coordenadas la velocidade x do centro do vórtice (U) e la velocidade y do centro do vórtice (V), obtemos que ($$) é:
| u = U - r \omega \sin \theta_w |
| v = V + r \omega \cos \theta_w |
ID:(11489, 0)
Modelo
Top
Parâmetros
Variáveis
Cálculos
Cálculos
Cálculos
Equações
r ^2=( X - x )^2 + ( Y - y )^2
r ^2=( X - x )^2 + ( Y - y )^2
\theta_w = \theta_0 + \omega t
theta_w = theta_0 + omega * t
u = U - r \omega \sin \theta_w
u = U - r * omega * sin( theta_w )
v_t = r \omega
v = r * omega
v = V + r \omega \cos \theta_w
v = V + r * omega * cos( theta_w )
x = X + r \cos \theta_w
x = X + r * cos( theta_w )
X = X_0 + U t
X = X_0 + U * t
y = Y + r \sin \theta_w
y = Y + r * sin( theta_w )
Y = Y_0 + V t
Y = Y_0 + V * t
ID:(15445, 0)
Posição do vértice x
Equação
O vórtice se move na direção x com uma constante de uma velocidade x do centro do vórtice (U), partindo de uma posição inicial x (X_0) e alcançando em o tempo desde o início do rastreamento (t) em x La posição x do centro do vórtice (X):
ID:(11495, 0)
Posição do vértice y
Equação
O vórtice se move na direção y com uma constante de uma velocidade y do centro do vórtice (V), partindo de uma posição inicial y (Y_0) e alcançando em o tempo desde o início do rastreamento (t) em y La posição y do centro do vórtice (Y):
ID:(11496, 0)
Ângulo \theta do vórtice
Equação
O vórtice gira constantemente em ($$), partindo de um ângulo inicial do objeto no vórtice (\theta_0) e chegando em o tempo desde o início do rastreamento (t) a um ângulo do objeto no vórtice (\theta_w):
ID:(11497, 0)
Distância do objeto ao centro do vórtice
Equação
A distância entre o objeto em la posição x do objeto (x) e la posição y do objeto (y) e o centro dos vórtices em la posição x do centro do vórtice (X) e la posição y do centro do vórtice (Y) pode ser calculada usando o teorema de Pitágoras, resultando em la distância do objeto ao centro do vórtice (r):
ID:(11500, 0)
Posição x do corpo em rotação
Equação
Se um corpo gira a um ângulo de o ângulo do objeto no vórtice (\theta_w) a uma distância de la distância do objeto ao centro do vórtice (r) de um centro localizado na posição la posição x do centro do vórtice (X), o resultado é Uma posição x do objeto (x):
ID:(11491, 0)
Posição y do corpo em rotação
Equação
Se um corpo gira a um ângulo de o ângulo do objeto no vórtice (\theta_w) a uma distância de la distância do objeto ao centro do vórtice (r) de um centro localizado na posição la posição y do centro do vórtice (Y), o resultado será Uma posição y do objeto (y):
ID:(11492, 0)
Velocidade e velocidade angular
Equação
Se dividirmos a relação entre la distância percorrida em um tempo (\Delta s) e o rádio (r) por la variação de ângulo (\Delta\theta),
| \Delta s=r \Delta\theta |
e então dividirmos isso por o tempo decorrido (\Delta t), obtemos a relação que nos permite calcular la velocidade (v) ao longo da órbita, conhecida como velocidade tangencial, que está associada a la velocidade angular (\omega):
Como la velocidade média (\bar{v}) é com la distância percorrida em um tempo (\Delta s) e o tempo decorrido (\Delta t), igual a
| \bar{v} \equiv\displaystyle\frac{ \Delta s }{ \Delta t } |
e com la distância percorrida em um tempo (\Delta s) expresso como arco de um círculo, e o rádio (r) e la variação de ângulo (\Delta\theta) são
| \Delta s=r \Delta\theta |
e a definição de la velocidade angular média (\bar{\omega}) é
| \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t } |
então,
v=\displaystyle\frac{\Delta s}{\Delta t}=r\displaystyle\frac{\Delta\theta}{\Delta t}=r\omega
Como a relação é geral, pode ser aplicada para valores instantâneos, resultando em
| v = r \omega |
ID:(3233, 0)
Velocidade x do corpo em rotação
Equação
Uma vez que o vórtice rotaciona a ($$) e está localizado a uma distância do objeto ao centro do vórtice (r) do seu centro, o objeto se move a uma velocidade tangencial do drifter (v_t):
Se um corpo está em um ângulo do objeto no vórtice (\theta_w) e a velocidade na direção x é La velocidade x do centro do vórtice (U), então ($$) é:
ID:(11493, 0)
Velocidade y do corpo em rotação
Equação
Dado que o vórtice gira a ($$) e está localizado a uma distância do objeto ao centro do vórtice (r) do seu centro, o objeto se desloca a uma velocidade tangencial do drifter (v_t):
Se um corpo está em um ângulo do objeto no vórtice (\theta_w) e a velocidade na direção y é La velocidade y do centro do vórtice (V), então ($$) é:
ID:(11494, 0)