
Trägheitsmoment der Stange, senkrechte Achse
Storyboard 
Das Trägheitsmoment ist das rotatorische Äquivalent der Masse in der Translation. Im Fall einer Stange, die um eine Achse senkrecht zu ihrer eigenen Achse rotiert, tritt der einfachste Fall auf, wenn die Rotation um das Massenzentrum stattfindet.
ID:(2090, 0)
Trägheitsmoment für eine Achse, die nicht durch den Massenschwerpunkt verläuft
Beschreibung
Wenn die Rotationsachse nicht durch den Schwerpunkt (CM) verläuft, kann das Trägheitsmoment I mithilfe des Satzes von Steiner berechnet werden. Dazu beginnen wir mit dem Trägheitsmoment bezüglich des Schwerpunkts, zum Beispiel:
• Für einen Balken mit einer senkrechten Achse wird es berechnet
| I_{CM} =\displaystyle\frac{1}{12} m l ^2 |
• Für einen Zylinder mit einer senkrechten Achse wird es berechnet
| I_{CM} =\displaystyle\frac{1}{12} m ( h ^2+3 r_c ^2) |
• Für einen Zylinder mit einer parallelen Achse wird es berechnet
| I_{CM} =\displaystyle\frac{1}{2} m r_c ^2 |
• Für ein Quader wird es berechnet
| I_{CM} =\displaystyle\frac{1}{12} m ( a ^2+ b ^2) |
• Für einen Würfel wird es berechnet
| I_{CM} =\displaystyle\frac{1}{6} m a ^2 |
• Für eine Kugel wird es berechnet
| I_{CM} =\displaystyle\frac{2}{5} m r_e ^2 |
Anschließend wird die Masse mit dem Quadrat des Abstands zwischen der Rotationsachse und dem Schwerpunkt multipliziert und addiert
| I = I_{CM} + m d ^2 |
ID:(15867, 0)
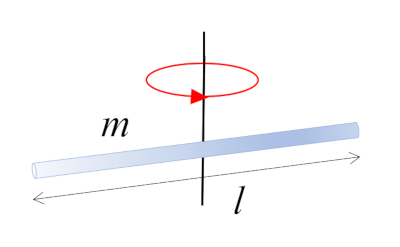
Balken, der sich um eine Achse \perp dreht
Bild
Ein Balken mit Masse m und Länge l, der um sein Zentrum rotiert, das mit dem Schwerpunkt übereinstimmt:
ID:(10962, 0)
Modell
Top
Parameter
Variablen
Berechnungen
Berechnungen
Berechnungen
Gleichungen
I = I_{CM} + m d ^2
I = I_CM + m * d ^ 2
I_{CM} =\displaystyle\frac{1}{12} m l ^2
I_CM = m * l ^ 2 / 12
\omega = \omega_0 + \alpha_0 ( t - t_0 )
omega = omega_0 + alpha_0 * ( t - t_0 )
T = I \alpha_0
T = I * alpha
T = r F
T = r * F
\theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2
theta = theta_0 + omega_0 *( t - t_0 )+ alpha_0 *( t - t_0 )^2/2
\theta = \theta_0 +\displaystyle\frac{ \omega ^2- \omega_0 ^2}{2 \alpha_0 }
theta = theta_0 +( omega ^2 - omega_0 ^2)/(2* alpha_0 )
ID:(15859, 0)
Trägheitsmoment der Stablänge l Achse \perp
Gleichung
Das Trägheitsmoment einer Stange, die sich um eine senkrechte (\perp) Achse dreht, die durch das Zentrum verläuft, wird ermittelt, indem der Körper in kleine Volumeneinheiten unterteilt und sie summiert werden:
| I =\displaystyle\int_V r ^2 \rho dV |
was zu folgendem Ergebnis führt:
.
ID:(4432, 0)
Steiner Satz
Gleichung
Der Trägheitsmoment für Achse, die nicht durch das CM verläuft (I) kann berechnet werden, indem der Trägheitsmoment Massenzentrum (I_{CM}) verwendet und das Trägheitsmoment von die Körpermasse (m) als Punktmasse bei die Entfernung Schwerpunkt und Achse (d) hinzugefügt wird:
ID:(3688, 0)
Drehmoment für konstantes Trägheitsmoment
Gleichung
Im Fall, dass das Trägheitsmoment konstant ist, ist die Ableitung des Drehimpulses gleich
| L = I \omega |
was bedeutet, dass das Drehmoment gleich ist
Da das Moment gleich ist
| L = I \omega |
folgt daraus, dass im Fall, dass sich das Trägheitsmoment nicht mit der Zeit ändert,
T=\displaystyle\frac{dL}{dt}=\displaystyle\frac{d}{dt}(I\omega) = I\displaystyle\frac{d\omega}{dt} = I\alpha
was bedeutet, dass
| T = I \alpha |
.
Diese Beziehung entspricht dem Äquivalent des zweiten Newtonschen Gesetzes für Rotation anstelle von Translation.
ID:(3253, 0)
Einfache Drehmoment-Kraft-Beziehung
Gleichung
Da das Verhältnis zwischen dem Drehimpuls und dem Moment wie folgt ist:
| L = r p |
führt uns die zeitliche Ableitung zu der Beziehung des Drehmoments
Si se deriva en el tiempo la relación para el momento angular
| L = r p |
para el caso de que el radio sea constante
T=\displaystyle\frac{dL}{dt}=r\displaystyle\frac{dp}{dt}=rF
por lo que
| T = r F |
Die Drehung des Körpers erfolgt um eine Achse in Richtung des Drehmoments, das durch den Schwerpunkt verläuft.
ID:(4431, 0)
Winkelgeschwindigkeit mit konstanter Winkelbeschleunigung
Gleichung
Mit die Constant Angular Acceleration (\alpha_0) stellt die Winkelgeschwindigkeit (\omega) eine lineare Beziehung mit der Zeit (t) her, die auch die Variablen die Anfängliche Winkelgeschwindigkeit (\omega_0) und der Startzeit (t_0) einbezieht, wie folgt:
Wenn wir annehmen, dass die Mittlere Winkelbeschleunigung (\bar{\alpha}) konstant und gleich die Constant Angular Acceleration (\alpha_0) ist, dann gilt die folgende Gleichung:
| \bar{\alpha} = \alpha_0 |
Daher, unter Berücksichtigung von die Unterschied in der Winkelgeschwindigkeiten (\Delta\omega) zusammen mit die Winkelgeschwindigkeit (\omega) und die Anfängliche Winkelgeschwindigkeit (\omega_0):
| \Delta\omega = \omega - \omega_0 |
und der Abgelaufene Zeit (\Delta t) in Bezug auf der Zeit (t) und der Startzeit (t_0):
| \Delta t \equiv t - t_0 |
kann die Gleichung für die Mittlere Winkelbeschleunigung (\bar{\alpha}):
| \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t } |
wie folgt ausgedrückt werden:
\alpha_0 = \alpha = \displaystyle\frac{\Delta \omega}{\Delta t} = \displaystyle\frac{\omega - \omega_0}{t - t_0}
Durch Auflösen erhalten wir:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
Diese Gleichung repräsentiert eine Gerade im Raum der Winkelgeschwindigkeit gegenüber der Zeit.
ID:(3237, 0)
Angulo bei Konstanter Winkelbeschleunigung
Gleichung
Da der gesamte Weg der Fläche unter der Kurve der Winkelgeschwindigkeit gegenüber der Zeit entspricht, ergibt sich im Fall von eine Constant Angular Acceleration (\alpha_0), dass der Weg der Winkel (\theta) mit den Variablen der Anfangswinkel (\theta_0), der Zeit (t), der Startzeit (t_0) und die Anfängliche Winkelgeschwindigkeit (\omega_0) wie folgt ist:
Im Fall von die Constant Angular Acceleration (\alpha_0) folgt die Winkelgeschwindigkeit (\omega) als Funktion von der Zeit (t) einer linearen Beziehung mit der Startzeit (t_0) und die Anfängliche Winkelgeschwindigkeit (\omega_0) in der Form:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
Da der zurückgelegte Winkel gleich der Fläche unter der Kurve der Winkelgeschwindigkeit-Zeit ist, kann in diesem Fall der Beitrag des Rechtecks:
\omega_0(t-t_0)
und des Dreiecks:
\displaystyle\frac{1}{2}\alpha_0(t-t_0)^2
hinzugefügt werden.
Dies führt uns zu dem Ausdruck für der Winkel (\theta) und der Anfangswinkel (\theta_0):
| \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2 |
Diese Ausdruck entspricht der allgemeinen Form einer Parabel.
ID:(3682, 0)
Bremswinkel als Funktion der Winkelgeschwindigkeit
Gleichung
Im Fall von die Constant Angular Acceleration (\alpha_0) wird die Funktion von die Winkelgeschwindigkeit (\omega) bezüglich der Zeit (t), zusammen mit den zusätzlichen Variablen die Anfängliche Winkelgeschwindigkeit (\omega_0) und der Startzeit (t_0), durch die Gleichung ausgedrückt:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
Aus dieser Gleichung lässt sich die Beziehung zwischen der Winkel (\theta) und der Anfangswinkel (\theta_0) sowie die Veränderung der Winkelgeschwindigkeit berechnen:
Wenn wir die Zeit in der Gleichung von die Winkelgeschwindigkeit (\omega) auflösen, die die Variablen die Anfängliche Winkelgeschwindigkeit (\omega_0), der Zeit (t), der Startzeit (t_0) und die Constant Angular Acceleration (\alpha_0) umfasst:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
erhalten wir den folgenden Ausdruck für die Zeit:
t - t_0 = \displaystyle\frac{\omega - \omega_0}{\alpha_0}
Diese Lösung kann in die Gleichung eingesetzt werden, um der Winkel (\theta) unter Verwendung von der Anfangswinkel (\theta_0) wie folgt zu berechnen:
| \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2 |
was in der folgenden Gleichung resultiert:
| \theta = \theta_0 +\displaystyle\frac{ \omega ^2- \omega_0 ^2}{2 \alpha_0 } |
ID:(4386, 0)