
Pêndulo físico
Storyboard 
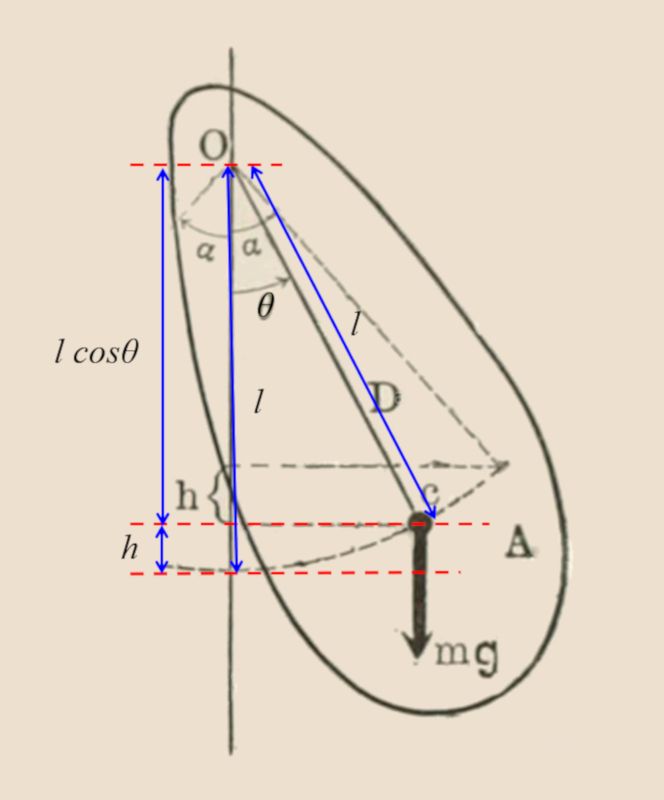
No caso de um pêndulo composto com uma massa real, a energia potencial é gerada ao elevar o centro de massa contra o campo gravitacional à medida que o pêndulo se desvia por um determinado ângulo.
ID:(1421, 0)
Oscilações com um pêndulo físico
Descrição
Ao contrário do pêndulo matemático, o pêndulo físico trabalha com uma massa real, não puntual. Enquanto o comprimento l é definido como a distância entre o eixo e o centro de massa do corpo, a energia potencial de ambos os pêndulos coincide. No entanto, a energia cinética não pode mais ser aproximada usando expressões que dependem apenas de l e m; é necessário conhecer o momento de inércia real do corpo.
ID:(7097, 0)
Pêndulo físico
Descrição
Diferentemente do pêndulo matemático, o pêndulo físico trabalha com uma massa real, não uma massa pontual. À medida que definimos o comprimento l como a distância entre o eixo e o centro de massa do corpo, a energia potencial de ambos os pêndulos coincide. No entanto, a energia cinética não pode mais ser aproximada pela expressão que depende de l e m; em vez disso, ela deve incluir o momento de inércia real do corpo.
ID:(1188, 0)
Modelo
Top
Parâmetros
Variáveis
Cálculos
Cálculos
Cálculos
Equações
E = K_r + V
E = K + V
K_r =\displaystyle\frac{1}{2} I \omega ^2
K_r = I * omega ^2/2
\nu =\displaystyle\frac{1}{ T }
nu =1/ T
\omega_0 = 2 \pi \nu
omega = 2* pi * nu
\omega_0 = \displaystyle\frac{2 \pi }{ T }
omega = 2* pi / T
\omega_0 ^2=\displaystyle\frac{ m g L }{ I }
omega_0 ^2 = m * g * L / I
\omega = - \theta_0 \omega_0 \sin \omega_0 t
v = - x_0 * omega_0 *sin( omega_0 * t )
V =\displaystyle\frac{1}{2} m_g g L \theta ^2
V = m_g * g * L * theta ^2/2
E =\displaystyle\frac{1}{2} m_g g L \theta_0 ^2
V = m_g * g * L * theta ^2/2
\theta = \theta_0 \cos \omega_0 t
x = x_0 *cos( omega_0 * t )
ID:(15853, 0)
Energia total
Equação
A energia total corresponde à soma da energia cinética total e da energia potencial:
ID:(3687, 0)
Energia cinética rotacional
Equação
No caso em que se estuda a translação, a definição de energia
| \Delta W = T \Delta\theta |
é aplicada à segunda lei de Newton
| T = I \alpha |
resultando na expressão
A energia necessária para que um objeto passe da velocidade angular \omega_1 para a velocidade angular \omega_2 pode ser calculada usando a definição
| \Delta W = T \Delta\theta |
Com a segunda lei de Newton, podemos reescrever essa expressão como
\Delta W=I \alpha \Delta\theta=I\displaystyle\frac{\Delta\omega}{\Delta t}\Delta\theta
Usando a definição de velocidade angular
| \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t } |
obtemos
\Delta W=I\displaystyle\frac{\Delta\omega}{\Delta t}\Delta\theta=I \omega \Delta\omega
A diferença entre as velocidades angulares é
\Delta\omega=\omega_2-\omega_1
Por outro lado, a própria velocidade angular pode ser aproximada pela velocidade angular média
\omega=\displaystyle\frac{\omega_1+\omega_2}{2}
Usando ambas as expressões, obtemos a equação
\Delta W=I \omega \Delta \omega=I(\omega_2-\omega_1)\displaystyle\frac{(\omega_1+\omega_2)}{2}=\displaystyle\frac{I}{2}(\omega_2^2-\omega_1^2)
Assim, a energia varia de acordo com
\Delta W=\displaystyle\frac{I}{2}\omega_2^2-\displaystyle\frac{I}{2}\omega_1^2
Podemos usar isso para definir a energia cinética
| K_r =\displaystyle\frac{1}{2} I \omega ^2 |
ID:(3255, 0)
Energia potencial de um pêndulo matemático para ângulos pequenos (1)
Equação
A energia potencial gravitacional de um pêndulo é
| U = m g L (1-\cos \theta ) |
que pode ser aproximada para ângulos pequenos como:
A energia potencial gravitacional de um pêndulo com massa
| U = m g L (1-\cos \theta ) |
onde
Para ângulos pequenos, a função cosseno pode ser aproximada pela expansão em série de Taylor até a segunda ordem
\cos\theta\sim 1-\displaystyle\frac{1}{2}\theta^2
Essa aproximação resulta em uma simplificação da energia potencial para
| V =\displaystyle\frac{1}{2} m_g g L \theta ^2 |
É importante observar que o ângulo deve estar em radianos.
ID:(4514, 1)
Energia potencial de um pêndulo matemático para ângulos pequenos (2)
Equação
A energia potencial gravitacional de um pêndulo é
| U = m g L (1-\cos \theta ) |
que pode ser aproximada para ângulos pequenos como:
A energia potencial gravitacional de um pêndulo com massa
| U = m g L (1-\cos \theta ) |
onde
Para ângulos pequenos, a função cosseno pode ser aproximada pela expansão em série de Taylor até a segunda ordem
\cos\theta\sim 1-\displaystyle\frac{1}{2}\theta^2
Essa aproximação resulta em uma simplificação da energia potencial para
| V =\displaystyle\frac{1}{2} m_g g L \theta ^2 |
É importante observar que o ângulo deve estar em radianos.
ID:(4514, 2)
Frequência angular para um pêndulo físico
Equação
No caso do pêndulo físico:
A energia é dada por:
E=\displaystyle\frac{1}{2}I\omega^2+\displaystyle\frac{1}{2}mgl\theta^2
Consequentemente, a frequência angular é:
Dado que a energia cinética do pêndulo físico com momento de inércia I e velocidade angular \omega é representada por
| K_r =\displaystyle\frac{1}{2} I \omega ^2 |
e a energia potencial gravitacional é dada por
| V =\displaystyle\frac{1}{2} m_g g L \theta ^2 |
onde m é a massa, l é o comprimento da corda, \theta é o ângulo e g é a aceleração angular, a equação de energia pode ser expressa como
E=\displaystyle\frac{1}{2}I\omega^2+\displaystyle\frac{1}{2}mgl\theta^2
Como o período é definido como
T=2\pi\sqrt{\displaystyle\frac{I}{mgl}}
podemos determinar a frequência angular da seguinte forma:
| \omega_0 ^2=\displaystyle\frac{ m g L }{ I } |
ID:(4517, 0)
Frequência angular
Equação
La frequência angular (\omega) é com la período (T) igual a
ID:(12335, 0)
Frequência
Equação
La frequência (\nu) corresponde ao número de vezes que ocorre uma oscilação em um segundo. Já La período (T) é o tempo que uma única oscilação leva. Portanto, o número de oscilações por segundo é:
A frequência é indicada em Hertz (Hz).
ID:(4427, 0)
Amplitude de oscilação
Equação
Com a descrição da oscilação usando
| z = x_0 \cos \omega_0 t + i x_0 \sin \omega_0 t |
a parte real corresponde à evolução temporal da amplitude
ID:(14074, 0)
Velocidade de oscilação
Equação
Ao obtermos a parte real da derivada do número complexo que representa a oscilação
| \dot{z} = i \omega_0 z |
cuja parte real corresponde à velocidade
Usando o número complexo
| z = x_0 \cos \omega_0 t + i x_0 \sin \omega_0 t |
introduzido em
| \dot{z} = i \omega_0 z |
obtemos
\dot{z} = i\omega_0 z = i \omega_0 x_0 \cos \omega_0 t - \omega_0 x_0 \sin \omega_0 t
assim, a velocidade é obtida como a parte real
| v = - x_0 \omega_0 \sin \omega_0 t |
ID:(14076, 0)