
Forcer de Stokes
Storyboard 
Un exemple de force visqueuse est le modèle qui se produit lorsqu'une sphère se déplace dans un milieu visqueux. Ce modèle et l'équation associée sont connus sous le nom de leur auteur, George Stokes.
La force de Stokes dépend de la viscosité du milieu, du rayon de la sphère et de la vitesse à laquelle elle se déplace dans le milieu. De manière similaire, si le milieu lui-même est en mouvement, il entraîne l'objet avec lui.
ID:(1964, 0)
Mécanismes
Iframe
Mécanismes
ID:(15540, 0)
George Stokes
Description
George Stokes a réalisé d\'importantes avancées dans les domaines de l\'hydrodynamique et des mathématiques. Il est principalement connu pour la célèbre loi de Stokes appliquée aux corps sphériques dans un écoulement et pour le théorème de Stokes en mathématiques.

ID:(12535, 0)
Forces sur une sphère tombant dans un milieu
Description
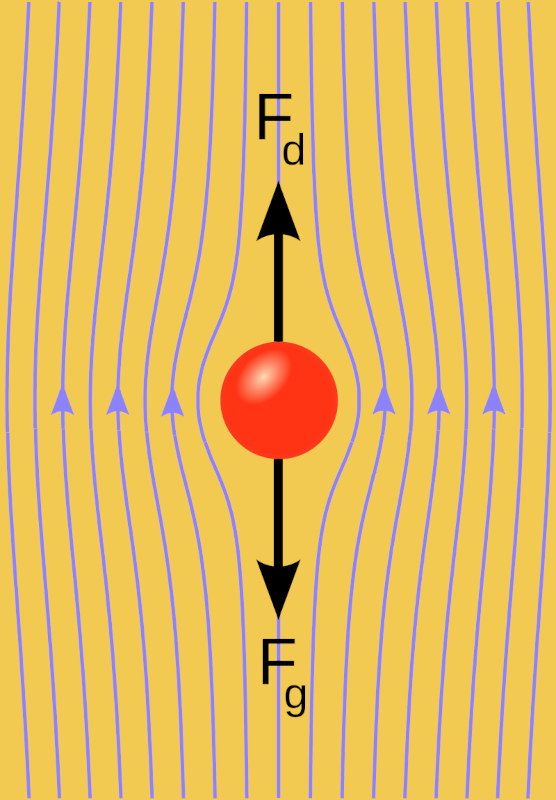
Lorsqu'une sphère est jetée dans un milieu visqueux, une force initiale ascendante, une force gravitationnelle (F_g), apparaît, entraînant progressivement l'enfoncement du corps. Pendant ce processus, la sphère gagne en vitesse, ce qui entraîne une force descendante, une force visqueuse (F_v), dépendante de la vitesse. Au fur et à mesure que la vitesse totale, a force à masse constante (F),
| F = F_g - F_v |
commence à diminuer jusqu'à devenir nulle. À partir de ce moment, le mouvement continue à une vitesse constante, car il n'y a pas de force pour l'accélérer.
ID:(15544, 0)
Force de Stokes
Top
La force de Stokes est la force générée par l'écoulement autour d'une sphère de ($$) immergée dedans. Dans ce cas, on utilise le modèle de force proportionnelle à A vitesse (v) :
Dans ce contexte, on peut démontrer que a constante de force visqueuse (b) avec a viscosité (\eta) est égal à :
par conséquent, la force de Stokes s'exprime comme suit :
Cette force s'applique principalement dans les écoulements laminaires.
ID:(15555, 0)
Vitesse de chute en milieu visqueux
Top
Le mouvement d'une sphère en deux dimensions est caractérisé par a composante x de la vitesse (v_x) avec a vitesse horizontale initiale (v_{0x}), a temps d'adaptation (\tau) et le temps (t) :
| v_x = v_{0x} e^{- t / \tau } |
et a composante y de la vitesse (v_y) avec a vitesse verticale initiale (v_{0y}), a temps d'adaptation (\tau), a accélération gravitationnelle (g) et le temps (t) :
| v_y = g \tau + ( v_{0y} - g \tau )e^{- t / \tau } |
ce qui est représenté dans un diagramme v_x vs v_y :
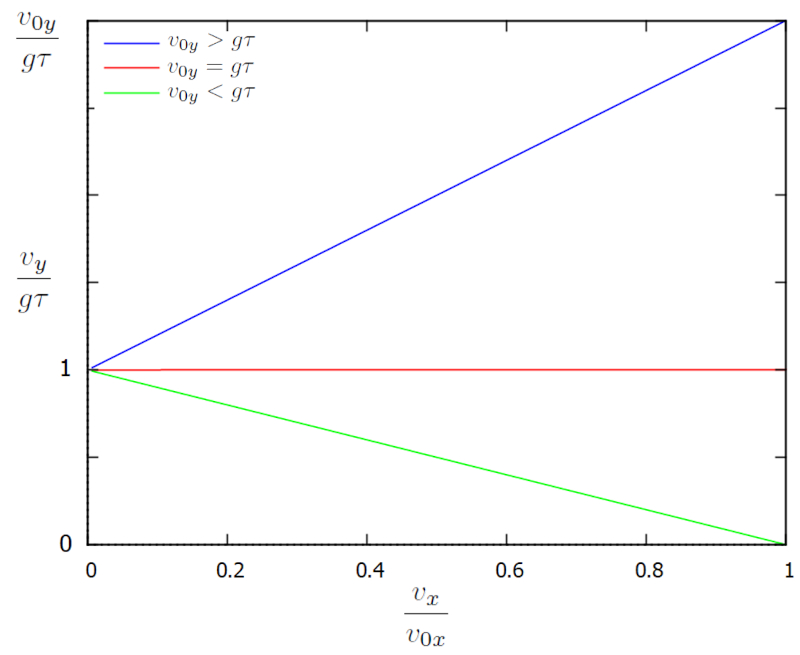
Le diagramme montre comment les deux composantes de la vitesse évoluent dans le temps. Initialement, v est égal à v_{0x}, ce qui correspond à un point sur le bord droit du graphique. Au fil du temps, les composantes de la vitesse évoluent de la droite vers le bord gauche, où la vitesse horizontale est nulle et la vitesse verticale atteint la limite de g\tau, de sorte que v/g\tau est égal à un.
ID:(15558, 0)
Chemin de chute en milieu visqueux
Top
La déplacement horizontal peut être calculé en utilisant l'équation pour a position sur l'axe des x (x) avec a position initiale sur l'axe des x (x_0), a vitesse horizontale initiale (v_{0x}), a temps d'adaptation (\tau) et le temps (t) :
| x = x_0 + v_{0x} \tau (1 - e^{- t / \tau }) |
et le déplacement vertical pour a position sur l'axe y (y) avec a position initiale sur l'axe y (y_0), a vitesse horizontale initiale (v_{0x}), a temps d'adaptation (\tau) et le temps (t) :
| y = y_0 + \tau g t + \tau ( v_{0y} - g \tau )(1 - e^{- t / \tau }) |
ce qui est graphiquement représenté dans les positions x vs y :
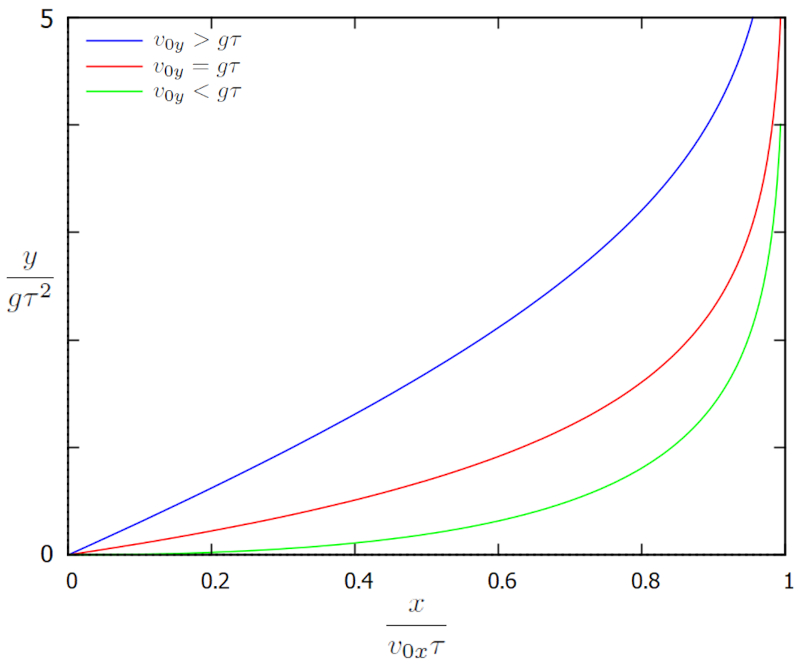
Dans ce cas, la position évolue du bord gauche vers la droite, où pour le mouvement horizontal atteignant une distance maximale de v_{0x}\tau. Le déplacement vertical est décrit avec un système de coordonnées ayant son origine au point où la trajectoire commence et dont la version verticale pointe vers le bas. Dans ce sens, l'augmentation de y correspond au mouvement descendant de la sphère dans la direction de la gravité.
ID:(15559, 0)
Méthode d'Ostwald pour mesurer la viscosité
Description
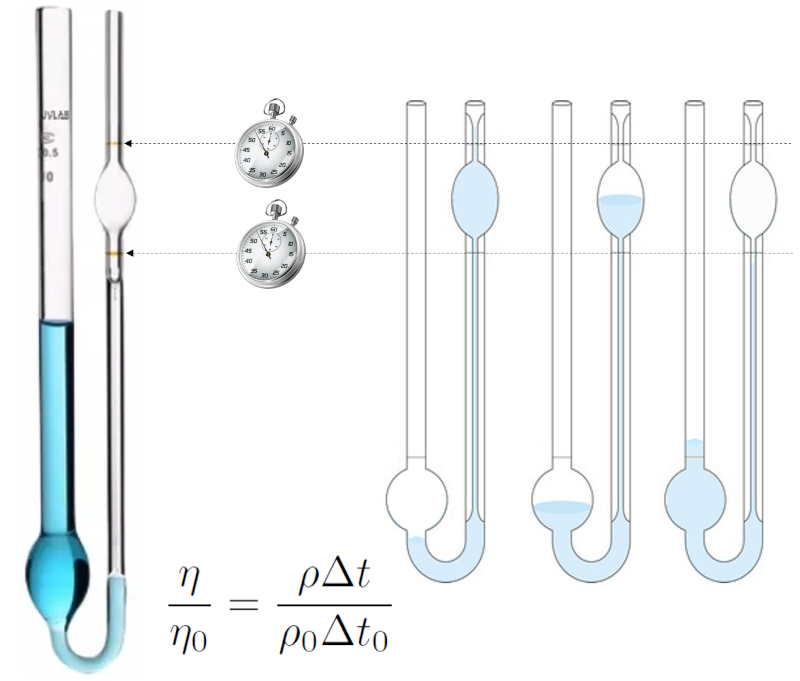
La méthode de mesure de la viscosité d'Ostwald est basée sur le comportement d'un liquide s'écoulant à travers un tube de petit rayon (capillaire).
Le liquide est introduit, une aspiration est appliquée pour dépasser la marque supérieure, puis il est laissé s'écouler, mesurant le temps qu'il faut pour que le niveau passe de la marque supérieure à la marque inférieure.
L'expérience est d'abord réalisée avec un liquide pour lequel la viscosité et la densité sont connues (par exemple, de l'eau distillée), puis avec le liquide pour lequel la viscosité doit être déterminée. Si les conditions sont identiques, le liquide qui s'écoule dans les deux cas sera similaire, et ainsi, le temps sera proportionnel à la densité divisée par la viscosité. Ainsi, une équation de comparaison entre les deux viscosités peut être établie :
ID:(15545, 0)
Modèle
Top
Paramètres
Variables
Calculs
Calculs
Calculs
Équations
b \equiv 6 \pi \eta r
b = 6* pi * eta * r
F = F_g - F_v
F = F_g - F_v
F = m_i a
F = m_i * a
F_g = m_g g
F_g = m_g * g
F_v = b v
F_v = b * v
F_v =6 \pi \eta r v
F_v =6* pi * eta * r * v
m_g = m_i
m_g = m_i
m_i a = m_g g - b v
m_i * a = m_g * g - b * v
\rho \equiv\displaystyle\frac{ m_i }{ V }
rho = M / V
\tau_g \equiv \displaystyle\frac{ m_g }{ b }
tau_g = m_g / b
\tau_i \equiv \displaystyle\frac{ m_i }{ b }
tau_i = m_i / b
V =\displaystyle\frac{4 \pi }{3} r ^3
V =4* pi * r ^3/3
v_x = v_{0x} e^{- t / \tau }
v_x = v_0x *exp(- t / tau )
v_y = g \tau + ( v_{0y} - g \tau )e^{- t / \tau }
v_y = g * tau + ( v_0y - g * tau )*e^(- t / tau )
x = x_0 + v_{0x} \tau (1 - e^{- t / \tau })
x = x_0 + v_0x * tau *(1-e^(- t / tau ))
y = y_0 + \tau g t + \tau ( v_{0y} - g \tau )(1 - e^{- t / \tau })
y = y_0 + tau * g * t + tau *( v_0y - g * tau )*(1-e^(- t / tau ))
\tau = \displaystyle\frac{2 r ^2 \rho }{9 \eta }
tau = 2* r ^2* rho /(9 * eta )
ID:(15542, 0)
Force totale du corps tombant dans un milieu visqueux
Équation
Dans le cas d'un corps tombant dans un milieu visqueux, la force totale, a force à masse constante (F), est égale à A force gravitationnelle (F_g) moins a force visqueuse (F_v), donc
ID:(15543, 0)
Cas de force masse constante
Équation
Dans le cas où A masse d'inertie (m_i) est égal à A masse initiale (m_0),
| m_g = m_i |
la dérivée de la quantité de mouvement sera égale à la masse multipliée par la dérivée de a vitesse (v). Comme la dérivée de la vitesse est a accélération instantanée (a), nous avons que a force à masse constante (F) est égal à
Étant donné que le moment (p) est défini avec a masse d'inertie (m_i) et a vitesse (v),
| p = m_i v |
Si a masse d'inertie (m_i) est égal à A masse initiale (m_0), alors nous pouvons dériver la quantité de mouvement par rapport au temps et obtenir a force à masse constante (F) :
F=\displaystyle\frac{d}{dt}p=m_i\displaystyle\frac{d}{dt}v=m_ia
Par conséquent, nous en concluons que
| F = m_i a |
ID:(10975, 0)
Force gravitationnelle
Équation
A force gravitationnelle (F_g) est basé sur a masse gravitationnelle (m_g) de l'objet et sur une constante qui reflète l'intensité de la gravité à la surface de la planète. Cette dernière est identifiée par a accélération gravitationnelle (g), qui est égal à 9.8 m/s^2.
Par conséquent, on en conclut que :
ID:(3241, 0)
Force visqueuse
Équation
La forme la plus simple de a force visqueuse (F_v) est celle qui est proportionnelle au a vitesse (v) du corps, représentée par :
La constante de proportionnalité, également connue sous le nom de a constante de force visqueuse (b), dépend généralement de la forme de l'objet et de la viscosité du milieu à travers lequel il se déplace. Un exemple de ce type de force est celle exercée par un flux de fluide sur un corps sphérique, dont l'expression mathématique est connue sous le nom de loi de Stokes.
ID:(3243, 0)
Force de Stokes
Équation
La force de Stokes est la force générée par l'écoulement autour d'une sphère immergée en son sein. Dans ce cas, le modèle de la force proportionnelle à la vitesse est utilisé :
| F_v = b v |
La force de traînée est définie en fonction de la viscosité du fluide et de la vitesse de la sphère selon l'équation :
| F_v = b v |
Stokes a explicitement calculé la résistance subie par la sphère et a déterminé que la viscosité est proportionnelle au rayon de la sphère et à sa vitesse, ce qui nous donne la relation suivante :
ID:(4871, 0)
Facteur de force de Stokes
Équation
Dans le cas de la force de Stokes sur a force visqueuse (F_v), elle est modélisée avec a constante de force visqueuse (b) et a vitesse (v),
| F_v = b v |
ce qui correspond à une valeur de a constante de force visqueuse (b) qui, avec a viscosité (\eta) et ($$), est égale à
ID:(15554, 0)
Équation de mouvement tombant dans un milieu visqueux
Équation
A force à masse constante (F) est égal à A force gravitationnelle (F_g) moins a force visqueuse (F_v), donc :
| F = F_g - F_v |
Cette relation permet d'établir l'équation de mouvement pour a accélération instantanée (a) avec une masse d'inertie (m_i) qui chute en raison de la gravité terrestre avec a accélération gravitationnelle (g), et avec une masse gravitationnelle (m_g), en a constante de force visqueuse (b), prendra la forme de :
ID:(14495, 0)
Masse et Densité
Équation
A densité (\rho) est défini comme le rapport entre a masse (M) et le volume (V), exprimé comme suit :
Cette propriété est spécifique au matériau en question.
ID:(3704, 0)
Volume de la sphère
Équation
A volume d'une sphère (V) pour une sphère avec un rayon d'une sphère (r) est calculée selon la formule suivante :
ID:(4445, 0)
Égalité des masses inertielle et gravitationnelle
Équation
Les masses que Newton a utilisées dans ses principes sont liées à l'inertie des corps, ce qui conduit au concept de a masse d'inertie (m_i).
La loi de Newton, qui est liée à la force entre les corps en raison de leurs masses, est associée à la gravité et est donc connue sous le nom de a masse gravitationnelle (m_g).
Empiriquement, on a conclu que les deux masses sont équivalentes, et donc nous définissons
Einstein a été celui qui a remis en question cette égalité et, à partir de ce doute, a compris pourquoi les deux 'apparaissent' égales dans sa théorie de la gravité. Dans son argument, Einstein a expliqué que les masses déforment l'espace, et cette déformation de l'espace provoque un changement dans le comportement des corps. Ainsi, les masses s'avèrent être équivalentes. Le concept révolutionnaire de la courbure de l'espace implique même que la lumière, qui n'a pas de masse, est affectée par les corps célestes, ce qui contredit la théorie de la gravitation de Newton. Cela a été démontré expérimentalement en étudiant le comportement de la lumière lors d'une éclipse solaire. Dans cette situation, les faisceaux lumineux sont déviés en raison de la présence du soleil, permettant l'observation des étoiles qui se trouvent derrière lui.
ID:(12552, 0)
Temps caractéristique de l'équation de Stokes
Équation
Avec le modèle de Stokes, la force visqueuse a constante de force visqueuse (b), qui dépend de ($$) et de a viscosité de l'environnement (\eta), calculée avec
| b \equiv 6 \pi \eta r |
conduit à ce que a temps de viscosité et masse d'inertie (\tau_i) et a temps de viscosité et masse gravitationnelle (\tau_g) prennent des valeurs égales a temps d'adaptation (\tau), calculées avec a densité (\rho) par l'intermédiaire de
Si le temps caractéristique est défini comme
\tau=\displaystyle\frac{m_i}{b}
et que le coefficient de la force visqueuse est
b=6\pi r\eta
D'autre part, en considérant que
| \rho \equiv\displaystyle\frac{ m_i }{ V } |
et
| V =\displaystyle\frac{4 \pi }{3} r ^3 |
on en déduit que la masse est
m_i = \rho V = \displaystyle\frac{4\pi}{3} r^3 \rho
ce qui conduit à
\tau = \displaystyle\frac{m_i}{b}=\displaystyle\frac{2 \rho r^2}{9\eta}
en d'autres termes,
| \tau = \displaystyle\frac{2 r ^2 \rho }{9 \eta } |
ID:(14465, 0)
Temps de masse gravitationnelle et viscosité
Équation
Avec l'équation de mouvement d'un corps dans un milieu visqueux, nous avons la dérivée de a vitesse (v) à Le temps (t) avec a masse d'inertie (m_i), a masse gravitationnelle (m_g), a constante de force visqueuse (b) et a accélération gravitationnelle (g) :
| m_i \displaystyle\frac{dv}{dt} = m_g g - b v |
Cela définit a temps de viscosité et masse d'inertie (\tau_i) comme :
ID:(15549, 0)
Vitesse horizontale en milieu visqueux
Équation
Dans le scénario de mouvement horizontal, la sphère rencontre une résistance uniquement due à la viscosité du milieu environnant, qui peut être quantifiée par l'équation impliquant a vitesse (v) avec a vitesse initiale (v_0), a temps de viscosité et masse d'inertie (\tau_i) et le temps (t) :
En conséquence, l'interaction entre ces éléments conduit à l'observation que a composante x de la vitesse (v_x) avec a vitesse horizontale initiale (v_{0x}), a temps d'adaptation (\tau) et le temps (t) :
ID:(6844, 0)
Position horizontale du milieu visqueux
Équation
Dans le contexte du mouvement horizontal, la position est obtenue en intégrant la vitesse, ce qui nous donne une équation en a position (s) avec a vitesse (s_0), a vitesse initiale (v_0), a temps de viscosité et masse gravitationnelle (\tau_g), a temps de viscosité et masse d'inertie (\tau_i), a accélération gravitationnelle (g) et le temps (t) :
| s = s_0 + v_0 \tau_i (1 - e^{- t / \tau_i }) |
A partir de cette équation, nous arrivons à l'équation de déplacement horizontal pour a position sur l'axe des x (x) avec a position initiale sur l'axe des x (x_0), a vitesse horizontale initiale (v_{0x}), a temps d'adaptation (\tau) et le temps (t) :
ID:(14467, 0)
Temps de masse inertielle et viscosité
Équation
Avec l'équation de mouvement d'un corps dans un milieu visqueux, nous avons la dérivée de a vitesse (v) à Le temps (t) avec a constante de force visqueuse (b) et a accélération gravitationnelle (g) :
| m_i \displaystyle\frac{dv}{dt} = - b v |
Cela définit a temps de viscosité et masse d'inertie (\tau_i) comme :
ID:(15548, 0)
Vitesse verticale dans un milieu visqueux sous gravité
Équation
Dans le contexte du mouvement vertical, la sphère est confrontée à une double résistance : d'une part, la viscosité du milieu environnant, et d'autre part, la gravité qui la pousse vers le bas. Cette dernière peut être quantifiée par l'équation en a vitesse (v) avec a vitesse initiale (v_0), a temps de viscosité et masse gravitationnelle (\tau_g), a temps de viscosité et masse d'inertie (\tau_i), a accélération gravitationnelle (g) et le temps (t) :
Nous supposons que la masse gravitationnelle et la masse inertielle sont identiques, alors nous obtenons la fonction pour a composante y de la vitesse (v_y) avec a vitesse verticale initiale (v_{0y}), a temps d'adaptation (\tau), a accélération gravitationnelle (g) et le temps (t) :
ID:(14466, 0)
Position verticale du milieu visqueux sous gravitation
Équation
Dans le contexte du mouvement vertical, la position est obtenue en intégrant la vitesse, ce qui nous donne une équation en a position (s) avec a vitesse (s_0), a vitesse initiale (v_0), a temps de viscosité et masse gravitationnelle (\tau_g), a temps de viscosité et masse d'inertie (\tau_i), a accélération gravitationnelle (g) et le temps (t) :
| s = s_0 + g \tau_g t +( v_0 - g \tau_g ) \tau_i (1 - e^{- t / \tau_i }) |
À partir de cette équation, nous arrivons à l'équation de déplacement vertical pour a position sur l'axe y (y) avec a position initiale sur l'axe y (y_0), a vitesse horizontale initiale (v_{0x}), a temps d'adaptation (\tau) et le temps (t) :
ID:(14468, 0)