
Controle de tom
Storyboard 
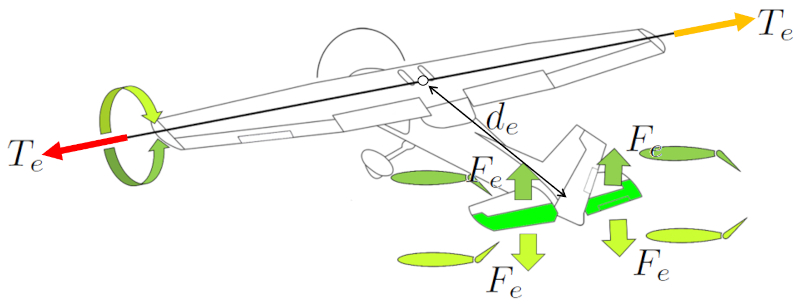
O controle de arfagem é o mecanismo que permite levantar ou abaixar o nariz da aeronave, sendo essencial para o movimento de subida ou descida. Esse controle é realizado através da geração de sustentação pelos profundores, localizados nas pequenas asas próximas à cauda da aeronave. Essa força de sustentação gera um torque, responsável por fazer a aeronave girar em torno de um eixo imaginário, paralelo às asas principais, conhecido como eixo de arfagem.
ID:(2113, 0)
Controle de tom
Conceito
Para inclinar o nariz da aeronave para cima ou para baixo, são utilizados os elevadores. Ambos são empregados de forma simétrica para gerar um efeito la força nos elevadores (F_e) simétrico. Colocando-os na cauda da aeronave, alcança-se uma ($$) maior eficácia ao posicioná-los próximo ao centro de massa. Isso proporciona controle suficiente para elevar ou baixar o nariz da aeronave.
Em aeronaves mais antigas, o controle dos ailerons traseiros é realizado através de um manche, onde empurrar para a frente faz o nariz da aeronave descer, e puxar para trás eleva o nariz. Nas aeronaves da família Airbus, esse controle é feito com um joystick.
No caso das aves, existe uma solução semelhante, embora neste caso, a cauda não seja interrompida por um leme.
ID:(15161, 0)

Massa da asa
Descrição
La massa da asa (m_w) pode ser aproximado como o volume de um paralelepípedo retângulo multiplicado pela densidade da aeronave:
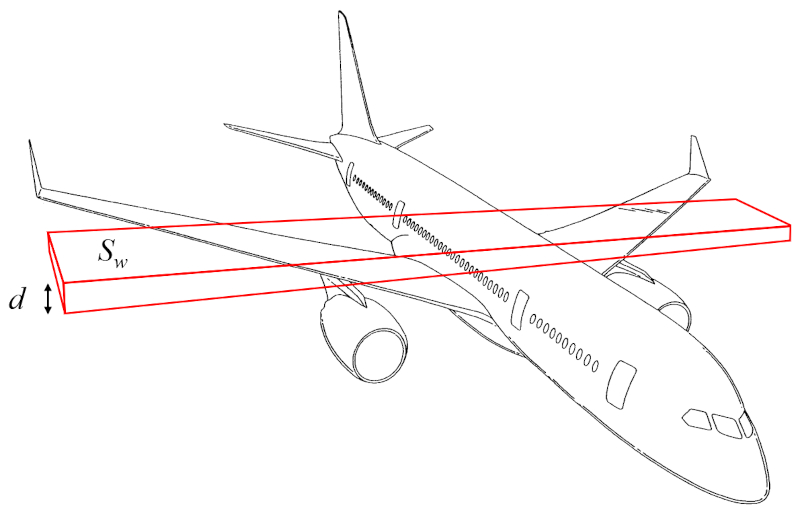
O volume, portanto, pode ser calculado a partir de la superfície que gera sustentação (S_w) e la altura da asa (d).
Assim, la massa da asa (m_w) é determinado utilizando o densidade corporal da aeronave (\rho_a), la superfície que gera sustentação (S_w) e la altura da asa (d), da seguinte maneira:
| m_w = \rho_a S_w d |
ID:(15989, 0)
Momento de inércia para lançamento
Descrição
O momento de inércia do eixo da asa (I_e) pode ser aproximado como o momento de inércia de um cilindro que representa o corpo da aeronave, rotacionando em torno de um eixo perpendicular ao eixo do cilindro, que é paralelo às asas:
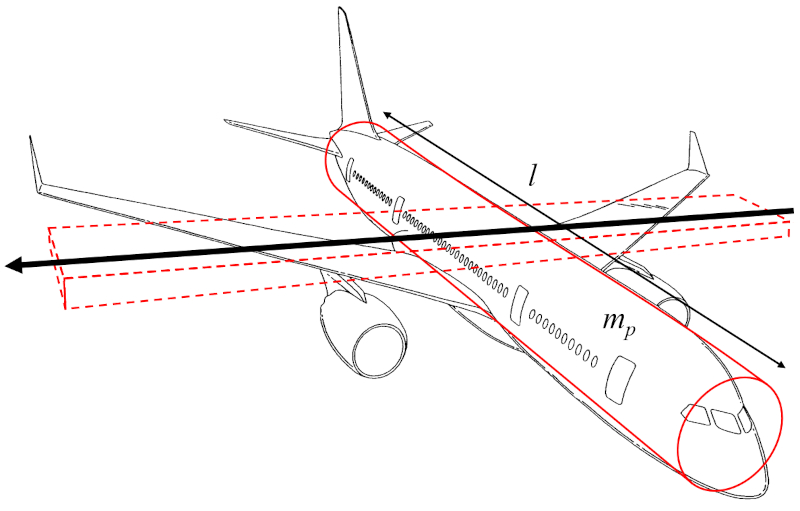
Como o largura da asa (w) é muito menor que o distância ao longo da asa (l), o termo envolvendo w^2 pode ser desprezado, focando apenas em la massa corporal da aeronave (m_p) e no termo com o distância ao longo da asa (l) ao quadrado.
Portanto, o momento de inércia do eixo da asa (I_e) é calculado a partir de la massa corporal da aeronave (m_p) e o distância ao longo da asa (l), da seguinte maneira:
ID:(15991, 0)
Modelo
Top
Parâmetros
Variáveis
Cálculos
Cálculos
Cálculos
Equações
C_L = c \alpha
C_L = c * alpha
d_e = \displaystyle\frac{ l }{2}
d_e = l /2
F_L =\displaystyle\frac{1}{2} \rho S_e C_L v ^2
F_L = rho * S_w * C_L * v ^2/2
I_e = \displaystyle\frac{1}{12} m_p l ^2
I_e = m_p * l ^2/12
m_p = \rho_a S_p l
m_p = rha_a * S_p * l
T_e = d_e F_L
T_e = d_e * F_e
T_e = I_e \alpha_e
T_e = I_e * alpha_e
ID:(15172, 0)
Força gerada pelo arremesso
Equação
ID:(15163, 0)
Torque de passo
Equação
ID:(15166, 0)
Sustentação
Equação
Para gerar uma pressão maior abaixo do que acima da asa e gerar sustentação, utiliza-se o princípio de Bernoulli, corrigindo a falta de conservação da densidade de energia com um coeficiente de elevação (C_L). A pressão sobre a asa, la força de elevação (F_L), pode ser estimada usando la densidade (\rho), la superfície que gera sustentação (S_w), o coeficiente de elevação (C_L) e la velocidade em relação ao meio (v) através da seguinte fórmula:
La força de elevação (F_L), juntamente com la envergadura das asas (L), la densidade (\rho), o fator de velocidade máxima da asa (c_t), o fator de velocidade inferior da asa (c_b), la comprimento superior da asa (l_t), la comprimento inferior da asa (l_b) e la velocidade em relação ao meio (v), encontra-se em
| F_L = \rho L ( c_b l_b - c_t l_t ) v ^2 |
Se considerarmos la superfície que gera sustentação (S_w), definido por la envergadura das asas (L), la comprimento superior da asa (l_t) e la comprimento inferior da asa (l_b),
| S_w = \displaystyle\frac{1}{2} L ( l_t + l_b ) |
e para o coeficiente de elevação (C_L), definido como
| C_L = 4\displaystyle\frac{ c_t l_t - c_b l_b }{ l_t + l_b } |
obtemos
| F_L =\displaystyle\frac{1}{2} \rho S_w C_L v ^2 |
ID:(4417, 0)
Constante de elevação
Equação
A partir de medições, conclui-se que o coeficiente de sustentação C_L é proporcional ao ângulo de ataque \alpha:
Após um certo ângulo, a curva diminui até chegar a zero. Isso ocorre porque acima desse ângulo crítico, os redemoinhos cobrem completamente a superfície superior da asa, levando à perda de sustentação. Esse fenômeno é conhecido como \"stall\" (estol em português).
ID:(4441, 0)
Momento de inércia para lançamento
Equação
La massa da asa (m_w) é calculado a partir de la massa corporal da aeronave (m_p) e ($$)10333
ID:(15987, 0)
Massa corporal da aeronave
Equação
La massa corporal da aeronave (m_p) é calculado a partir de o densidade corporal da aeronave (\rho_a), o perfil total do objeto (S_p) e o distância ao longo da asa (l), da seguinte forma:
ID:(15985, 0)
Braço de força de elevadores
Equação
La centro de distância de massa e elevadores (d_e) é definido como a metade de o distância ao longo da asa (l), expressado da seguinte maneira:
ID:(15994, 0)