
Principle of Lever's Law
Description 
Since the torque generated by the gravitational force and the lever arm is
| T = r F |
on each side of the balance, it must cancel out in the case of equilibrium to achieve balance:
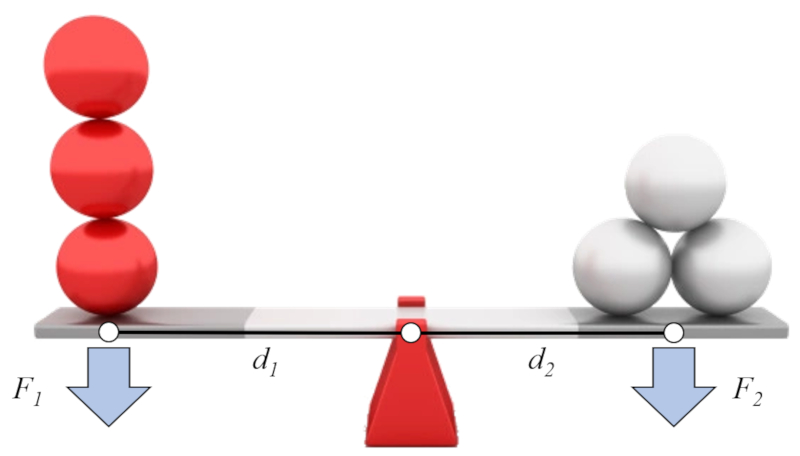
If we assume that on one side we have the force 1 (F_1) and the force - axis distance (arm) 1 (d_1), and on the other side the force 2 (F_2) and the force - axis distance (arm) 2 (d_2), we can establish the well-known lever law as follows:
| d_1 F_1 = d_2 F_2 |
ID:(15847, 0)
Model
Top
Parameters
Variables
Calculations
Calculations
Calculations
Equations
d_1 F_1 = d_2 F_2
d_1 * F_1 = d_2 * F_2
F_1 = m_1 g
F_g = m_g * g
F_2 = m_2 g
F_g = m_g * g
T_1 = d_1 F_1
T = r * F
T_2 = d_2 F_2
T = r * F
ID:(15846, 0)
Lever Law
Equation
If a bar mounted on a point acting as a pivot is subjected to the force 1 (F_1) at the force - axis distance (arm) 1 (d_1) from the pivot, generating a torque T_1, and to the force 2 (F_2) at the force - axis distance (arm) 2 (d_2) from the pivot, generating a torque T_2, it will be in equilibrium if both torques are equal. Therefore, the equilibrium corresponds to the so-called law of the lever, expressed as:
In the case of a balance, a gravitational force acts on each arm, generating a torque
| T = r F |
If the lengths of the arms are d_i and the forces are F_i with i=1,2, the equilibrium condition requires that the sum of the torques be zero:
| \displaystyle\sum_i \vec{T}_i=0 |
Therefore, considering that the sign of each torque depends on the direction in which it induces rotation,
d_1F_1-d_2F_2=0
which results in
| d_1 F_1 = d_2 F_2 |
.
ID:(3250, 0)
Simple torque - force relationship (1)
Equation
Since the relationship between angular momentum and torque is
| L = r p |
its temporal derivative leads us to the torque relationship
Si se deriva en el tiempo la relación para el momento angular
| L = r p |
para el caso de que el radio sea constante
T=\displaystyle\frac{dL}{dt}=r\displaystyle\frac{dp}{dt}=rF
por lo que
| T = r F |
The body's rotation occurs around an axis in the direction of the torque, which passes through the center of mass.
ID:(4431, 1)
Simple torque - force relationship (2)
Equation
Since the relationship between angular momentum and torque is
| L = r p |
its temporal derivative leads us to the torque relationship
Si se deriva en el tiempo la relación para el momento angular
| L = r p |
para el caso de que el radio sea constante
T=\displaystyle\frac{dL}{dt}=r\displaystyle\frac{dp}{dt}=rF
por lo que
| T = r F |
The body's rotation occurs around an axis in the direction of the torque, which passes through the center of mass.
ID:(4431, 2)
Gravitational Force (1)
Equation
The gravitational Force (F_g) is based on the gravitational mass (m_g) of the object and on a constant reflecting the intensity of gravity at the planet's surface. The latter is identified by the gravitational Acceleration (g), which is equal to 9.8 m/s^2.
Consequently, it is concluded that:
ID:(3241, 1)
Gravitational Force (2)
Equation
The gravitational Force (F_g) is based on the gravitational mass (m_g) of the object and on a constant reflecting the intensity of gravity at the planet's surface. The latter is identified by the gravitational Acceleration (g), which is equal to 9.8 m/s^2.
Consequently, it is concluded that:
ID:(3241, 2)