
Momento de inércia do paralelepípedo reto
Storyboard 
O momento de inércia é o equivalente rotacional da massa no movimento de translação. No caso de um paralelepípedo reto que gira em torno de um de seus eixos, o caso mais simples ocorre quando a rotação acontece ao redor do centro de massa.
ID:(2089, 0)
Momento de inércia para um eixo que não passa pelo centro de massa
Descrição
Quando o eixo de rotação não passa pelo centro de massa (CM), o momento de inércia I pode ser calculado usando o Teorema de Steiner. Para isso, começa-se com o momento de inércia em relação ao centro de massa, por exemplo:
• Para uma barra com um eixo perpendicular, é calculado
| I_{CM} =\displaystyle\frac{1}{12} m l ^2 |
• Para um cilindro com um eixo perpendicular, é calculado
| I_{CM} =\displaystyle\frac{1}{12} m ( h ^2+3 r_c ^2) |
• Para um cilindro com um eixo paralelo, é calculado
| I_{CM} =\displaystyle\frac{1}{2} m r_c ^2 |
• Para um paralelepípedo, é calculado
| I_{CM} =\displaystyle\frac{1}{12} m ( a ^2+ b ^2) |
• Para um cubo, é calculado
| I_{CM} =\displaystyle\frac{1}{6} m a ^2 |
• Para uma esfera, é calculado
| I_{CM} =\displaystyle\frac{2}{5} m r_e ^2 |
Em seguida, a massa multiplicada pelo quadrado da distância entre o eixo de rotação e o centro de massa é adicionada
| I = I_{CM} + m d ^2 |
ID:(15867, 0)
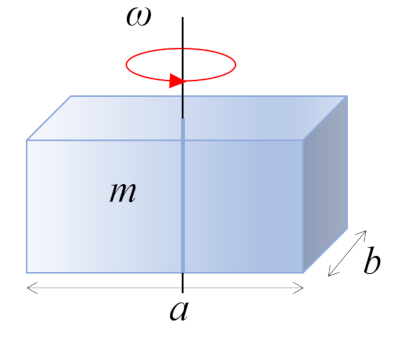
Momento de inércia de um paralelepípedo regular
Imagem
Um paralelepípedo reto com massa m e lados a e b, perpendicular ao eixo de rotação, está girando em torno de seu centro de massa, que se encontra no centro geométrico do corpo:
ID:(10973, 0)
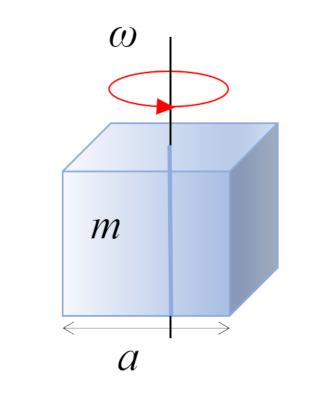
Paralelepípedo direito
Imagem
No caso de um paralelepípedo reto com massa m e lado a, o centro de massa está localizado no centro geométrico:
ID:(10963, 0)
Aplicação do teorema de Steiner para um paralelepípedo reto
Imagem
Para um paralelepípedo reto com eixo paralelo a uma aresta:
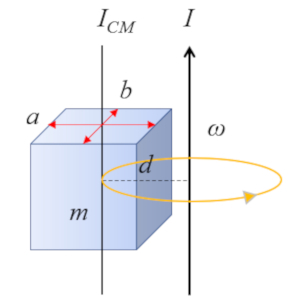
cujo momento de inércia em relação ao centro de massa (CM) é definido como
| I_{CM} =\displaystyle\frac{1}{12} m ( a ^2+ b ^2) |
o cálculo do momento de inércia pode ser realizado utilizando o teorema de Steiner com a seguinte fórmula
| I = I_{CM} + m d ^2 |
.
ID:(11554, 0)
Modelo
Top
Parâmetros
Variáveis
Cálculos
Cálculos
Cálculos
Equações
I = I_{CM} + m d ^2
I = I_CM + m * d ^ 2
I_{CM} =\displaystyle\frac{1}{12} m ( a ^2+ b ^2)
I_CM = m * ( a ^ 2 + b ^ 2 ) / 12
\omega = \omega_0 + \alpha_0 ( t - t_0 )
omega = omega_0 + alpha_0 * ( t - t_0 )
T = I \alpha_0
T = I * alpha
T = r F
T = r * F
\theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2
theta = theta_0 + omega_0 *( t - t_0 )+ alpha_0 *( t - t_0 )^2/2
\theta = \theta_0 +\displaystyle\frac{ \omega ^2- \omega_0 ^2}{2 \alpha_0 }
theta = theta_0 +( omega ^2 - omega_0 ^2)/(2* alpha_0 )
ID:(15862, 0)
Momento de inércia de um paralelepípedo reto
Equação
O momento de inércia de um paralelepípedo que está em rotação em torno de um eixo que passa pelo centro é obtido ao dividir o corpo em pequenos volumes e somá-los:
resultando em
.
ID:(4433, 0)
Teorema de Steiner
Equação
La momento de inércia do eixo que não passa pelo CM (I) pode ser calculado usando la momento de inércia do centro de massa (I_{CM}) e somando o momento de inércia de la massa corporal (m) como se fosse uma massa pontual em la distância centro de massa e eixo (d):
ID:(3688, 0)
Torque para momento de inércia constante
Equação
No caso em que o momento de inércia é constante, a derivada do momento angular é igual a
| L = I \omega |
o que implica que o torque é igual a
Como o momento é igual a
| L = I \omega |
segue-se que no caso em que o momento de inércia não muda com o tempo,
T=\displaystyle\frac{dL}{dt}=\displaystyle\frac{d}{dt}(I\omega) = I\displaystyle\frac{d\omega}{dt} = I\alpha
o que implica que
| T = I \alpha |
.
Essa relação é o equivalente da segunda lei de Newton para a rotação em vez da translação.
ID:(3253, 0)
Torque simples - relação de força
Equação
Dado que a relação entre o momento angular e o torque é
| L = r p |
sua derivada temporal nos leva à relação do torque
A rotação do corpo ocorre em torno de um eixo na direção do torque, que passa pelo centro de massa.
ID:(4431, 0)
Velocidade angular com aceleração angular constante
Equação
Com la aceleração angular constante (\alpha_0), la velocidade angular (\omega) forma uma relação linear com o tempo (t), incorporando as variáveis la velocidade angular inicial (\omega_0) e o tempo inicial (t_0) da seguinte forma:
Se assumirmos que la aceleração angular média (\bar{\alpha}) é constante, equivalente a la aceleração angular constante (\alpha_0), então a seguinte equação se aplica:
| \bar{\alpha} = \alpha_0 |
Portanto, considerando la diferença de velocidades angulares (\Delta\omega) junto com la velocidade angular (\omega) e la velocidade angular inicial (\omega_0):
| \Delta\omega = \omega - \omega_0 |
e o tempo decorrido (\Delta t) em relação a o tempo (t) e o tempo inicial (t_0):
| \Delta t \equiv t - t_0 |
a equação para la aceleração angular média (\bar{\alpha}):
| \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t } |
pode ser expressa como:
\alpha_0 = \alpha = \displaystyle\frac{\Delta \omega}{\Delta t} = \displaystyle\frac{\omega - \omega_0}{t - t_0}
Resolvendo isso, obtemos:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
Esta equação representa uma linha reta no plano de velocidade angular versus tempo.
ID:(3237, 0)
Ângulo para aceleração angular constante
Equação
Dado que o deslocamento total corresponde à área sob a curva de velocidade angular versus tempo, no caso de uma aceleração angular constante (\alpha_0), determina-se que o deslocamento o ângulo (\theta) com as variáveis o ângulo inicial (\theta_0), o tempo (t), o tempo inicial (t_0) e la velocidade angular inicial (\omega_0) é o seguinte:
No caso de la aceleração angular constante (\alpha_0), la velocidade angular (\omega) como função de o tempo (t) segue uma relação linear com o tempo inicial (t_0) e la velocidade angular inicial (\omega_0) na forma:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
Dado que o deslocamento angular é igual à área sob a curva de velocidade angular-tempo, neste caso, pode-se adicionar as contribuições do retângulo:
\omega_0(t-t_0)
e do triângulo:
\displaystyle\frac{1}{2}\alpha_0(t-t_0)^2
Isso nos leva à expressão para o ângulo (\theta) e o ângulo inicial (\theta_0):
| \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2 |
Essa expressão corresponde à forma geral de uma parábola.
ID:(3682, 0)
Ângulo de frenagem em função da velocidade angular
Equação
No caso de la aceleração angular constante (\alpha_0), a função de la velocidade angular (\omega) em relação a o tempo (t), juntamente com as variáveis adicionais la velocidade angular inicial (\omega_0) e o tempo inicial (t_0), é expressa pela equação:
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
A partir desta equação, é possível calcular a relação entre o ângulo (\theta) e o ângulo inicial (\theta_0), bem como a mudança na velocidade angular:
Se resolvermos o tempo na equação de la velocidade angular (\omega) que inclui as variáveis la velocidade angular inicial (\omega_0), o tempo (t), o tempo inicial (t_0) e la aceleração angular constante (\alpha_0):
| \omega = \omega_0 + \alpha_0 ( t - t_0 ) |
obtemos a seguinte expressão para o tempo:
t - t_0 = \displaystyle\frac{\omega - \omega_0}{\alpha_0}
Esta solução pode ser substituída na equação para calcular o ângulo (\theta) usando o ângulo inicial (\theta_0) da seguinte forma:
| \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2 |
o que resulta na seguinte equação:
| \theta = \theta_0 +\displaystyle\frac{ \omega ^2- \omega_0 ^2}{2 \alpha_0 } |
ID:(4386, 0)