
Constant angular acceleration, two stages
Storyboard 
In the case of an accelerated angular motion in two stages, when transitioning from the first to the second angular acceleration, the final angular velocity of the first stage becomes the initial angular velocity of the second stage. The same applies to the angle, where the final angle of the first stage equals the initial angle of the second stage.
Unlike the two-angular-velocity model, this model doesn't exhibit discontinuity issues, except that the angular acceleration can change abruptly, which is technically possible but often not very realistic.
ID:(1409, 0)
Two-stage movement
Image
In a two-stage motion scenario, initially the object adjusts its speed by the difference of the variation of angular velocities in the first stage ($\Delta\omega_1$) over a period of the time spent in the first stage ($\Delta t_1$), experiencing an acceleration of the angular acceleration during the first stage ($\alpha_1$).
| $ \alpha_1 \equiv \displaystyle\frac{ \Delta\omega_1 }{ \Delta t_1 }$ |
In the second stage, the object continues to modify its speed by the variation of angular velocities in the second stage ($\Delta\omega_2$) over a time span of the time spent in the second stage ($\Delta t_2$), with an acceleration of the angular acceleration during the second stage ($\alpha_2$).
| $ \alpha_2 \equiv \displaystyle\frac{ \Delta\omega_2 }{ \Delta t_2 }$ |
When visualized graphically, this results in a velocity versus time diagram as shown below:
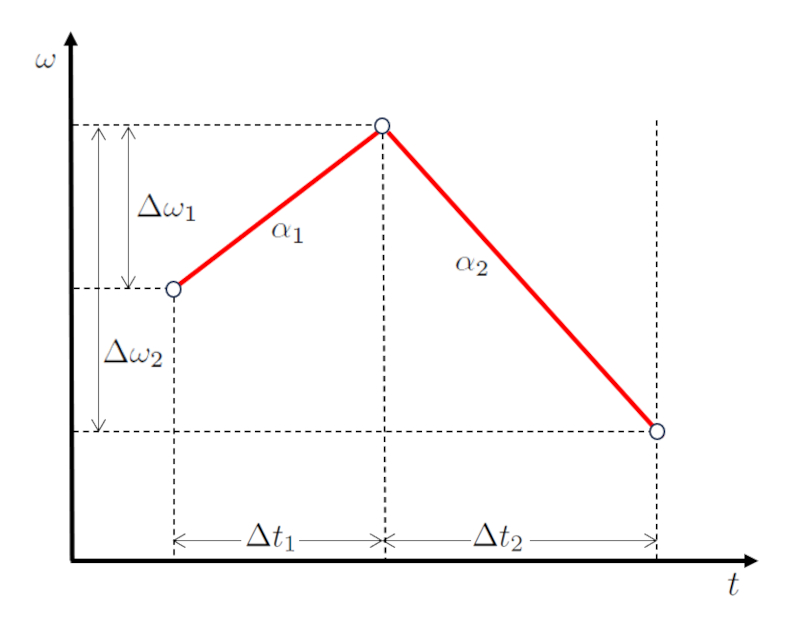
It is important to note that the time intervals the time spent in the first stage ($\Delta t_1$) and the time spent in the second stage ($\Delta t_2$) are sequential, just like the speed differences the variation of angular velocities in the first stage ($\Delta\omega_1$) and the variation of angular velocities in the second stage ($\Delta\omega_2$).
ID:(12521, 0)
Angular velocity in a two-stage movement
Note
In the analysis of motion segmented into two stages, the first phase is characterized by a linear function that incorporates points the start Time ($t_0$), the final time of first and start of second stage ($t_1$), the initial Angular Speed ($\omega_0$), and the first final angular velocity and second stage start ($\omega_1$). This is expressed through a line with a slope of the angular acceleration during the first stage ($\alpha_1$), whose mathematical relationship is specified in the following equation:
| $ \omega_1 = \omega_0 + \alpha_1 ( t_1 - t_0 )$ |
Transitioning to the second stage, which is defined by the points the first final angular velocity and second stage start ($\omega_1$), the final angular velocity of the second stage ($\omega_2$), the final time of first and start of second stage ($t_1$), and the second stage ending time ($t_2$), a new linear function with a slope of the angular acceleration during the second stage ($\alpha_2$) is adopted. This relationship is outlined by the second equation presented:
| $ \omega_2 = \omega_1 + \alpha_2 ( t_2 - t_1 )$ |
The graphical representation of these linear relationships is illustrated below, providing a clear visualization of how the slope varies between the two stages:

ID:(12522, 0)
Angle in a two-stage movement
Quote
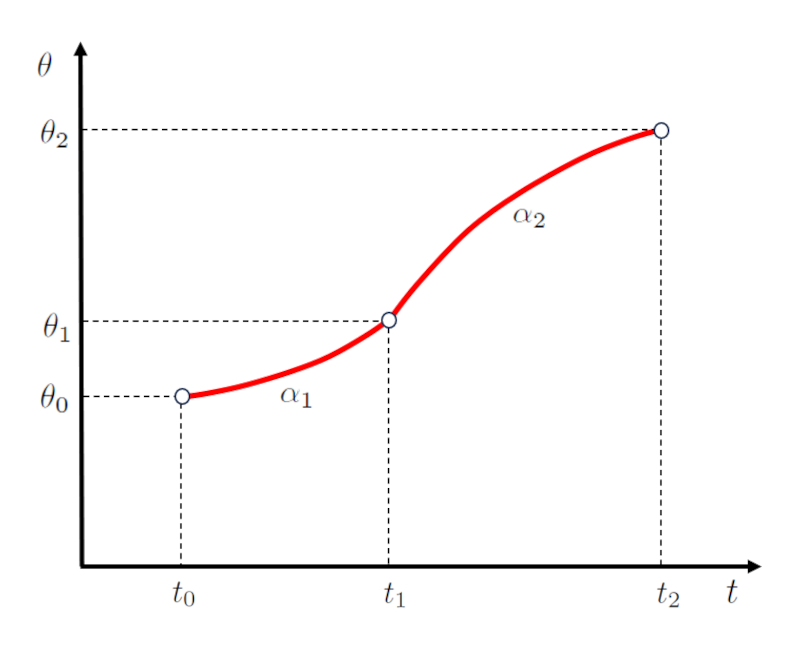
In a scenario of motion divided into two stages, the angle at the end of the first stage is the same as the angle at the beginning of the second stage, designated as the first final angle and second stage began ($\theta_1$).
Similarly, the time at which the first stage ends coincides with the start of the second stage, marked by the final time of first and start of second stage ($t_1$).
Given that the motion is defined by the angular acceleration experienced, the angular velocity at the end of the first stage must match the initial angular velocity of the second stage, indicated by the first final angular velocity and second stage start ($\omega_1$).
In the context of constant angular acceleration, the angle at the first final angle and second stage began ($\theta_1$) is determined by the variables the initial Angle ($\theta_0$), the initial Angular Speed ($\omega_0$), the angular acceleration during the first stage ($\alpha_1$), the final time of first and start of second stage ($t_1$), and the start Time ($t_0$), as shown in the following equation:
| $ \theta_1 = \theta_0 + \omega_0 ( t_1 - t_0 )+\displaystyle\frac{1}{2} \alpha_1 ( t_1 - t_0 )^2$ |
In the second stage, the angle at the second stage final angle ($\theta_2$) is calculated based on the first final angle and second stage began ($\theta_1$), the first final angular velocity and second stage start ($\omega_1$), the angular acceleration during the second stage ($\alpha_2$), the final time of first and start of second stage ($t_1$), and the second stage ending time ($t_2$), according to:
| $ \theta_2 = \theta_1 + \omega_1 ( t_2 - t_1 )+\displaystyle\frac{1}{2} \alpha_2 ( t_2 - t_1 )^2$ |
The graphical representation of these relationships is illustrated below:
ID:(12520, 0)
Constant angular acceleration, two stages
Description
In the case of an accelerated angular motion in two stages, when transitioning from the first to the second angular acceleration, the final angular velocity of the first stage becomes the initial angular velocity of the second stage. The same applies to the angle, where the final angle of the first stage equals the initial angle of the second stage. Unlike the two-angular-velocity model, this model doesn't exhibit discontinuity issues, except that the angular acceleration can change abruptly, which is technically possible but often not very realistic.
Variables
Calculations
Calculations
Equations
The definition of average angular acceleration is based on the angle covered
| $ \Delta\omega = \omega_2 - \omega_1 $ |
and the elapsed time
| $ \Delta t \equiv t - t_0 $ |
The relationship between the two is defined as the average angular acceleration
| $ \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t }$ |
within that time interval.
(ID 3234)
The definition of average angular acceleration is based on the angle covered
| $ \Delta\omega = \omega_2 - \omega_1 $ |
and the elapsed time
| $ \Delta t \equiv t - t_0 $ |
The relationship between the two is defined as the average angular acceleration
| $ \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t }$ |
within that time interval.
(ID 3234)
Given that the mean Acceleration ($\bar{a}$) equals the speed Diference ($\Delta v$) and the time elapsed ($\Delta t$) according to
| $ \bar{a} \equiv\displaystyle\frac{ \Delta v }{ \Delta t }$ |
and the mean Angular Acceleration ($\bar{\alpha}$) equals the difference in Angular Speeds ($\Delta\omega$) and the time elapsed ($\Delta t$) as per
| $ \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t }$ |
it follows that
$\bar{a}=\displaystyle\frac{\Delta v}{\Delta t}=r\displaystyle\frac{\Delta\omega}{\Delta t}=\bar{\alpha}$
Assuming that the mean Angular Acceleration ($\bar{\alpha}$) is equal to the constant Angular Acceleration ($\alpha_0$)
| $ \bar{\alpha} = \alpha_0 $ |
and assuming that the mean Acceleration ($\bar{a}$) equals the constant Acceleration ($a_0$)
| $ a_0 = \bar{a} $ |
then the following equation is obtained:
| $ a = r \alpha $ |
(ID 3236)
Given that the mean Acceleration ($\bar{a}$) equals the speed Diference ($\Delta v$) and the time elapsed ($\Delta t$) according to
| $ \bar{a} \equiv\displaystyle\frac{ \Delta v }{ \Delta t }$ |
and the mean Angular Acceleration ($\bar{\alpha}$) equals the difference in Angular Speeds ($\Delta\omega$) and the time elapsed ($\Delta t$) as per
| $ \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t }$ |
it follows that
$\bar{a}=\displaystyle\frac{\Delta v}{\Delta t}=r\displaystyle\frac{\Delta\omega}{\Delta t}=\bar{\alpha}$
Assuming that the mean Angular Acceleration ($\bar{\alpha}$) is equal to the constant Angular Acceleration ($\alpha_0$)
| $ \bar{\alpha} = \alpha_0 $ |
and assuming that the mean Acceleration ($\bar{a}$) equals the constant Acceleration ($a_0$)
| $ a_0 = \bar{a} $ |
then the following equation is obtained:
| $ a = r \alpha $ |
(ID 3236)
If we assume that the mean Angular Acceleration ($\bar{\alpha}$) is constant, equivalent to the constant Angular Acceleration ($\alpha_0$), then the following equation applies:
| $ \bar{\alpha} = \alpha_0 $ |
Therefore, considering the difference in Angular Speeds ($\Delta\omega$) along with the angular Speed ($\omega$) and the initial Angular Speed ($\omega_0$):
| $ \Delta\omega = \omega_2 - \omega_1 $ |
and the time elapsed ($\Delta t$) in relation to the time ($t$) and the start Time ($t_0$):
| $ \Delta t \equiv t - t_0 $ |
the equation for the mean Angular Acceleration ($\bar{\alpha}$):
| $ \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t }$ |
can be expressed as:
$\alpha_0 = \alpha = \displaystyle\frac{\Delta \omega}{\Delta t} = \displaystyle\frac{\omega - \omega_0}{t - t_0}$
Solving this, we obtain:
| $ \omega = \omega_0 + \alpha_0 ( t - t_0 )$ |
(ID 3237)
If we assume that the mean Angular Acceleration ($\bar{\alpha}$) is constant, equivalent to the constant Angular Acceleration ($\alpha_0$), then the following equation applies:
| $ \bar{\alpha} = \alpha_0 $ |
Therefore, considering the difference in Angular Speeds ($\Delta\omega$) along with the angular Speed ($\omega$) and the initial Angular Speed ($\omega_0$):
| $ \Delta\omega = \omega_2 - \omega_1 $ |
and the time elapsed ($\Delta t$) in relation to the time ($t$) and the start Time ($t_0$):
| $ \Delta t \equiv t - t_0 $ |
the equation for the mean Angular Acceleration ($\bar{\alpha}$):
| $ \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t }$ |
can be expressed as:
$\alpha_0 = \alpha = \displaystyle\frac{\Delta \omega}{\Delta t} = \displaystyle\frac{\omega - \omega_0}{t - t_0}$
Solving this, we obtain:
| $ \omega = \omega_0 + \alpha_0 ( t - t_0 )$ |
(ID 3237)
In the case of the constant Angular Acceleration ($\alpha_0$), the angular Speed ($\omega$) as a function of the time ($t$) follows a linear relationship with the start Time ($t_0$) and the initial Angular Speed ($\omega_0$) in the form of:
| $ \omega = \omega_0 + \alpha_0 ( t - t_0 )$ |
Given that the angular displacement is equal to the area under the angular velocity-time curve, in this case, one can add the contributions of the rectangle:
$\omega_0(t-t_0)$
and the triangle:
$\displaystyle\frac{1}{2}\alpha_0(t-t_0)^2$
This leads us to the expression for the angle ($\theta$) and the initial Angle ($\theta_0$):
| $ \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2$ |
(ID 3682)
In the case of the constant Angular Acceleration ($\alpha_0$), the angular Speed ($\omega$) as a function of the time ($t$) follows a linear relationship with the start Time ($t_0$) and the initial Angular Speed ($\omega_0$) in the form of:
| $ \omega = \omega_0 + \alpha_0 ( t - t_0 )$ |
Given that the angular displacement is equal to the area under the angular velocity-time curve, in this case, one can add the contributions of the rectangle:
$\omega_0(t-t_0)$
and the triangle:
$\displaystyle\frac{1}{2}\alpha_0(t-t_0)^2$
This leads us to the expression for the angle ($\theta$) and the initial Angle ($\theta_0$):
| $ \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2$ |
(ID 3682)
If we solve for time in the equation of the angular Speed ($\omega$) that includes the variables the initial Angular Speed ($\omega_0$), the time ($t$), the start Time ($t_0$), and the constant Angular Acceleration ($\alpha_0$):
| $ \omega = \omega_0 + \alpha_0 ( t - t_0 )$ |
we obtain the following expression for time:
$t - t_0 = \displaystyle\frac{\omega - \omega_0}{\alpha_0}$
This solution can be substituted into the equation to calculate the angle ($\theta$) using the initial Angle ($\theta_0$) as follows:
| $ \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2$ |
which results in the following equation:
| $ \theta = \theta_0 +\displaystyle\frac{ \omega ^2- \omega_0 ^2}{2 \alpha_0 }$ |
(ID 4386)
If we solve for time in the equation of the angular Speed ($\omega$) that includes the variables the initial Angular Speed ($\omega_0$), the time ($t$), the start Time ($t_0$), and the constant Angular Acceleration ($\alpha_0$):
| $ \omega = \omega_0 + \alpha_0 ( t - t_0 )$ |
we obtain the following expression for time:
$t - t_0 = \displaystyle\frac{\omega - \omega_0}{\alpha_0}$
This solution can be substituted into the equation to calculate the angle ($\theta$) using the initial Angle ($\theta_0$) as follows:
| $ \theta = \theta_0 + \omega_0 ( t - t_0 )+\displaystyle\frac{1}{2} \alpha_0 ( t - t_0 )^2$ |
which results in the following equation:
| $ \theta = \theta_0 +\displaystyle\frac{ \omega ^2- \omega_0 ^2}{2 \alpha_0 }$ |
(ID 4386)
Examples
(ID 15413)
In a two-stage motion scenario, initially the object adjusts its speed by the difference of the variation of angular velocities in the first stage ($\Delta\omega_1$) over a period of the time spent in the first stage ($\Delta t_1$), experiencing an acceleration of the angular acceleration during the first stage ($\alpha_1$).
| $ \alpha_1 \equiv \displaystyle\frac{ \Delta\omega_1 }{ \Delta t_1 }$ |
In the second stage, the object continues to modify its speed by the variation of angular velocities in the second stage ($\Delta\omega_2$) over a time span of the time spent in the second stage ($\Delta t_2$), with an acceleration of the angular acceleration during the second stage ($\alpha_2$).
| $ \alpha_2 \equiv \displaystyle\frac{ \Delta\omega_2 }{ \Delta t_2 }$ |
When visualized graphically, this results in a velocity versus time diagram as shown below:
It is important to note that the time intervals the time spent in the first stage ($\Delta t_1$) and the time spent in the second stage ($\Delta t_2$) are sequential, just like the speed differences the variation of angular velocities in the first stage ($\Delta\omega_1$) and the variation of angular velocities in the second stage ($\Delta\omega_2$).
(ID 12521)
In the analysis of motion segmented into two stages, the first phase is characterized by a linear function that incorporates points the start Time ($t_0$), the final time of first and start of second stage ($t_1$), the initial Angular Speed ($\omega_0$), and the first final angular velocity and second stage start ($\omega_1$). This is expressed through a line with a slope of the angular acceleration during the first stage ($\alpha_1$), whose mathematical relationship is specified in the following equation:
| $ \omega_1 = \omega_0 + \alpha_1 ( t_1 - t_0 )$ |
Transitioning to the second stage, which is defined by the points the first final angular velocity and second stage start ($\omega_1$), the final angular velocity of the second stage ($\omega_2$), the final time of first and start of second stage ($t_1$), and the second stage ending time ($t_2$), a new linear function with a slope of the angular acceleration during the second stage ($\alpha_2$) is adopted. This relationship is outlined by the second equation presented:
| $ \omega_2 = \omega_1 + \alpha_2 ( t_2 - t_1 )$ |
The graphical representation of these linear relationships is illustrated below, providing a clear visualization of how the slope varies between the two stages:
(ID 12522)
In a scenario of motion divided into two stages, the angle at the end of the first stage is the same as the angle at the beginning of the second stage, designated as the first final angle and second stage began ($\theta_1$).
Similarly, the time at which the first stage ends coincides with the start of the second stage, marked by the final time of first and start of second stage ($t_1$).
Given that the motion is defined by the angular acceleration experienced, the angular velocity at the end of the first stage must match the initial angular velocity of the second stage, indicated by the first final angular velocity and second stage start ($\omega_1$).
In the context of constant angular acceleration, the angle at the first final angle and second stage began ($\theta_1$) is determined by the variables the initial Angle ($\theta_0$), the initial Angular Speed ($\omega_0$), the angular acceleration during the first stage ($\alpha_1$), the final time of first and start of second stage ($t_1$), and the start Time ($t_0$), as shown in the following equation:
| $ \theta_1 = \theta_0 + \omega_0 ( t_1 - t_0 )+\displaystyle\frac{1}{2} \alpha_1 ( t_1 - t_0 )^2$ |
In the second stage, the angle at the second stage final angle ($\theta_2$) is calculated based on the first final angle and second stage began ($\theta_1$), the first final angular velocity and second stage start ($\omega_1$), the angular acceleration during the second stage ($\alpha_2$), the final time of first and start of second stage ($t_1$), and the second stage ending time ($t_2$), according to:
| $ \theta_2 = \theta_1 + \omega_1 ( t_2 - t_1 )+\displaystyle\frac{1}{2} \alpha_2 ( t_2 - t_1 )^2$ |
The graphical representation of these relationships is illustrated below:
(ID 12520)
(ID 15424)
ID:(1409, 0)