
Sonar
Storyboard 
Un autre usage du son dans l'eau est le sonar, utilisé à la fois comme outil technologique et comme technique employée par les baleines et les dauphins (biosonar) pour déterminer les distances.
Le biosonar est utilisé à la fois pour la navigation et la chasse, en estimant les distances et même les vitesses pour prédire les mouvements futurs de la proie.
ID:(1597, 0)
L'émetteur et le réflecteur sont au repos
Concept
Dans le cas où à la fois l'émetteur et le réflecteur ne se déplacent pas, le trajet parcouru par le son est égal à deux fois ($$) :
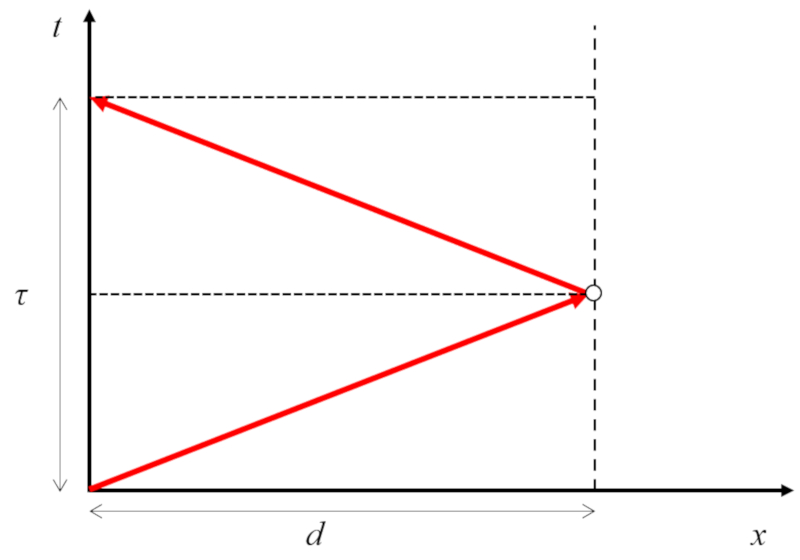
Comme le trajet se parcourt à A vitesse du son (c) en a temps d'écho (\tau_1), nous avons que ($$) est :
ID:(11870, 0)
Émetteur en mouvement et réflecteur au repos
Concept
Dans le cas où l'émetteur se déplace à une vitesse a vitesse de l'émetteur (v_e) et que le réflecteur est au repos, a vitesse du son (d_0) varie en fonction de si le son voyageant à A vitesse du son (c) nécessite a temps d'écho (\tau_1) soit plus grande (si les corps s'éloignent) ou plus petite (si les corps se rapprochent) :
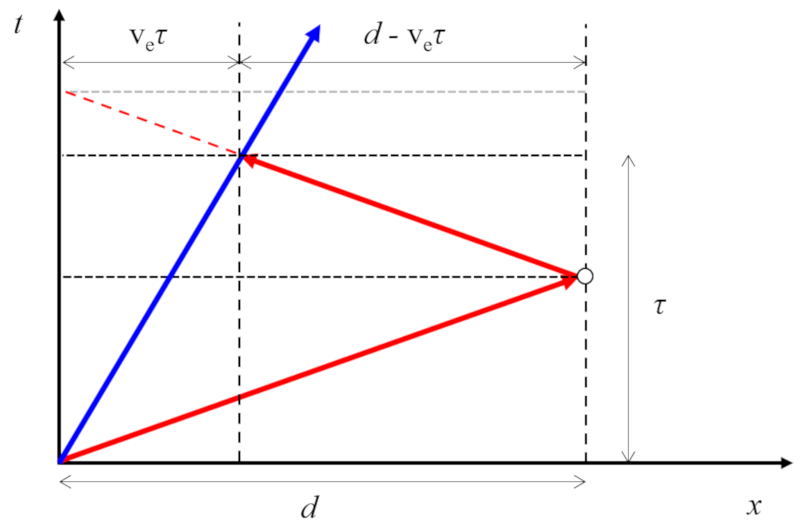
Par conséquent, a vitesse du son (d_0) est égal à
| d_0 = \displaystyle\frac{1}{2} (c + v_e) \tau_1 |
et la position du réflecteur par rapport à l'émetteur est
| x = \displaystyle\frac{1}{2}( c + v_e ) \tau_1 - v_e t |
en fonction de le temps écoulé depuis le début du suivi (t).
ID:(11871, 0)
Émetteur et réflecteur en mouvement
Concept
Dans le cas où l'émetteur se déplace à une vitesse a vitesse de l'émetteur (v_e) et où le réflecteur se déplace à une vitesse a vitesse du réflecteur ou du récepteur (v_o), la distance entre l'émetteur et le réflecteur peut être soit plus grande (v_e > v_o) soit plus petite (v_e < v_o). Si l'on représente cette situation en incluant a temps d'écho (\tau_1), le temps du deuxième écho (\tau_2) et le temps entre les impulsions (\tau), on obtient :
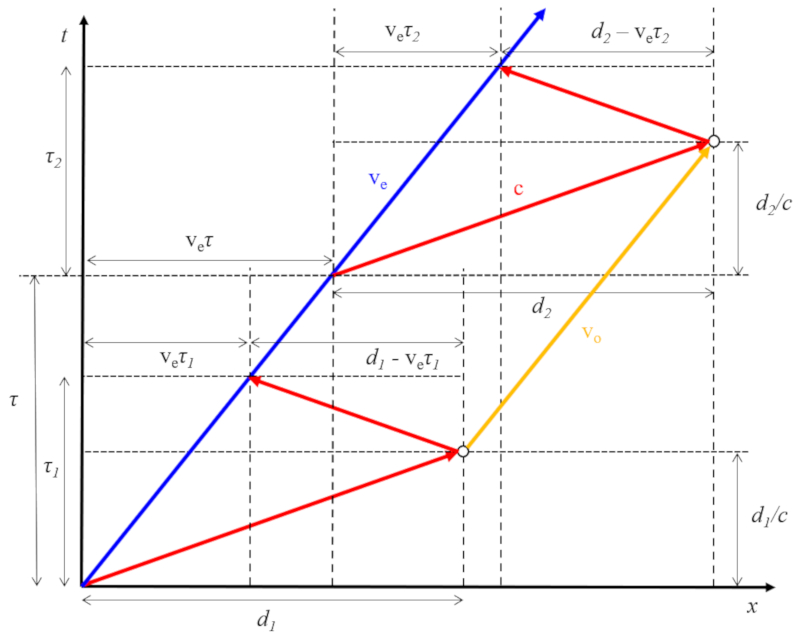
En calculant le chemin parcouru et le temps écoulé par le réflecteur entre les deux impulsions, on obtient a vitesse du réflecteur ou du récepteur (v_o) comme suit :
| v_o = \displaystyle\frac{2 v_e \tau + ( c + v_e )( \tau_2 - \tau_1 )}{2 c \tau + ( c + v_e )( \tau_2 - \tau_1 )}c |
Connaissant à la fois a vitesse de l'émetteur (v_e) et a vitesse du réflecteur ou du récepteur (v_o), on peut exprimer a position relative de l'émetteur en mouvement et du réflecteur au repos (x) en fonction de le temps écoulé depuis le début du suivi (t) de la manière suivante :
| x =\displaystyle\frac{(2 \tau \tau_1 +( \tau_2 - \tau_1 ) t )( c - v_e )( v_e + c )}{( v_e + c )( \tau_2 - \tau_1 )+2 c \tau )} |
avec a vitesse du son (c).
ID:(11872, 0)
Modèle
Top
Paramètres
Variables
Calculs
Calculs
Calculs
Équations
d = \displaystyle\frac{1}{2} c \tau_1
d = c * tau_1 /2
d_0 = \displaystyle\frac{1}{2} (c + v_e) \tau_1
d_0 =( c + v_e )* tau_1 /2
v_o = \displaystyle\frac{2 v_e \tau + ( c + v_e )( \tau_2 - \tau_1 )}{2 c \tau + ( c + v_e )( \tau_2 - \tau_1 )}c
v_o = c *( 2* v_e * tau + ( c + v_e )*( tau_2 - tau_1 ))/(2* c * tau + ( c + v_e )*( tau_2 - tau_1 ))
x = \displaystyle\frac{1}{2}( c + v_e ) \tau_1 - v_e t
x = ( c + v_e )* tau_1 /2 - v_e * t
x =\displaystyle\frac{(2 \tau \tau_1 +( \tau_2 - \tau_1 ) t )( c - v_e )( v_e + c )}{( v_e + c )( \tau_2 - \tau_1 )+2 c \tau )}
x =((2* tau * tau_1 +( tau_2 - tau_1 )* t )*( c - v_e )*( v_e + c ))/(( v_e + c )*( tau_2 - tau_1 ) + 2* c * tau ))
ID:(15469, 0)
L'émetteur de distance et le réflecteur sont au repos
Équation
En l'absence de mouvement, le temps nécessaire au signal a temps d'écho (\tau_1) pour parcourir la distance à la vitesse du son a vitesse du son (c) est de c \tau, soit le double de la distance entre l'émetteur et le réflecteur.
Par conséquent, ($$) est :
ID:(11873, 0)
Distance entre l'émetteur en mouvement et le réflecteur au repos
Équation
Dans le cas où l'émetteur se déplace à une vitesse de a vitesse de l'émetteur (v_e) et que le réflecteur reste immobile, sa distance initiale a vitesse du son (d_0) peut être estimée en utilisant le temps d'écho a temps d'écho (\tau_1). Dans ce scénario, la distance parcourue est égale à c \tau_1, qui est égal à la distance initiale entre l'émetteur et le réflecteur a vitesse du son (d_0), plus le retour, qui est le même d_0 moins la distance parcourue par l'émetteur v_e\tau_1. Ainsi, nous avons :
d_0 + d_0 - v_e\tau_1 = c\tau_1
ou que a vitesse du son (d_0) est :
ID:(11874, 0)
Position relative de l'émetteur en mouvement et du réflecteur au repos
Équation
Pour déterminer a position relative de l'émetteur en mouvement et du réflecteur au repos (x), il faut considérer a vitesse du son (d_0) et soustraire le chemin parcouru par l'émetteur. Ce dernier est calculé à partir de a vitesse de l'émetteur (v_e) et le temps écoulé depuis le début du suivi (t), ce qui donne :
ID:(11876, 0)
Vitesse du réflecteur en mouvement
Équation
A vitesse du réflecteur ou du récepteur (v_o) peut être calculé à partir de a vitesse de l'émetteur (v_e) et a vitesse du son (c), ainsi que a temps d'écho (\tau_1), le temps du deuxième écho (\tau_2) et le temps entre les impulsions (\tau), en utilisant la formule suivante :
Avec a distance à l'objet lors de l'émission du premier signal (d_1) et a vitesse du son (c), on peut estimer le moment où le premier signal se reflète comme d_1/c, et avec a distance à l'objet lors de l'émission du premier signal (d_2), le deuxième moment comme \tau + d_2/c. Ainsi, le temps entre les réflexions des deux signaux est donné par :
\Delta\tau = \tau + \displaystyle\frac{ d_2 }{ c } - \displaystyle\frac{ d_1 }{ c }
La position où le premier signal se reflète est a distance à l'objet lors de l'émission du premier signal (d_1), et la deuxième est ($$). Par conséquent, la distance parcourue par le réflecteur est :
\Delta x = v_e \tau + d_2 - d_1
Ainsi, la vitesse du réflecteur est :
v_o=\displaystyle\frac{\Delta x}{\Delta t}=\displaystyle\frac{ v_e\tau + d_2 - d_1}{ \tau + \displaystyle\frac{d_2}{c} - \displaystyle\frac{d_1}{c}}
Comme mentionné précédemment dans temps d'écho s, vitesse de l'émetteur m/s, vitesse du son m et vitesse du son m/s, la différence entre les distances parcourues est donnée par :
d_2-d_1=\displaystyle\frac{1}{2}( c + v_e )( \tau_2 - \tau_1 )
et la vitesse résultante est :
| v_o = \displaystyle\frac{2 v_e \tau + ( c + v_e )( \tau_2 - \tau_1 )}{2 c \tau + ( c + v_e )( \tau_2 - \tau_1 )}c |
ID:(11877, 0)