
Escoamento turbulento através de dois tubos fechados em série
Storyboard 
Ao contrário do fluxo laminar, a relação entre pressão e fluxo, ou densidade de fluxo, não é linear no regime turbulento, o que impede a soma direta das resistências hidráulicas. Além do termo quadrático na equação de Darcy-Weisbach, o fator de atrito depende do número de Reynolds, que por sua vez é uma função da velocidade do fluido. Isso significa que, embora o cálculo ainda seja possível, ele deve ser feito em etapas, levando em consideração as variações de fluxo em cada segmento.
ID:(2112, 0)
Equação de Darcy-Weisbach
Conceito
Ao modelar o fluxo em um tubo, assumindo que a densidade de energia é conservada, obtém-se a equação de Bernoulli. Esta equação descreve o fluxo utilizando la diferença de pressão (\Delta p) em termos de la densidade líquida (\rho_w), la velocidade média do fluido (v) e la diferença de velocidade entre superfícies (\Delta v):
| \Delta p = - \rho \bar{v} \Delta v |
No caso de fluxo turbulento, o processo de mistura atua como uma fricção que reduz o gradiente de velocidade presente no fluxo laminar entre o centro e as paredes do tubo. Se assumirmos que este efeito de mistura pode ser modelado com um simples fator de correção, chegamos empiricamente à equação de Darcy-Weisbach, que envolve o fator de atrito Darcy-Weisbach (f_D), o comprimento do tubo (\Delta L) e la diâmetro hidrodinâmico (D_H):
| \Delta p = \displaystyle\frac{ \Delta L }{ D_H } f_D \displaystyle\frac{1}{2} \rho_w j_s ^2 |
O fator o fator de atrito Darcy-Weisbach (f_D) foi determinado empiricamente para várias condições de fluxo e é expresso em função de o número de Reynolds (Re).
ID:(15893, 0)
Diagrama Moody
Imagem
Em 1944, Lewis Ferry Moody mediu o fator de atrito de Darcy-Weisbach como função do número de Reynolds e da rugosidade relativa da parede, resultando na criação do seguinte diagrama:
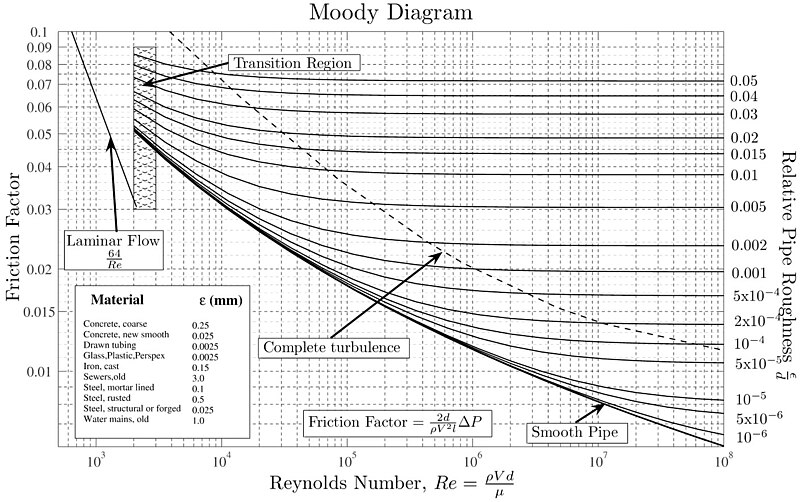
A rugosidade relativa pode ser estimada considerando o tamanho das irregularidades da superfície (altura de saliências ou profundidade de sulcos) em relação ao diâmetro hidráulico.
São observados dois comportamentos distintos:
• Para números de Reynolds abaixo de 2000, o fator de atrito de Darcy-Weisbach depende apenas do número de Reynolds, seguindo uma relação de 64/Re. Isso corresponde ao regime de escoamento laminar.
• Para números de Reynolds acima de 2000, observa-se um comportamento que depende tanto do número de Reynolds quanto da rugosidade relativa da superfície do tubo.
ID:(14528, 0)
Diâmetro hidráulico
Conceito
No contexto da equação de Darcy-Weisbach, utiliza-se uma diâmetro hidrodinâmico (D_H), que corresponde a uma generalização do diâmetro tradicional de um círculo. Isso permite considerar uma seção que não seja circular e calcular um diâmetro equivalente com base na área de la seção de tubo (S) e seu o perímetro (P) utilizando a seguinte fórmula:
| D_H = \displaystyle\frac{ 4 S }{ P } |
Para uma seção circular, obtemos o diâmetro tradicional de um círculo da seguinte maneira:
D_H = \displaystyle\frac{4 S}{P} = \displaystyle\frac{4 \pi R^2}{2 \pi R} = 2R
ID:(15894, 0)
Perímetro hidrodinâmico em tubo não preenchido
Conceito
O perímetro hidrodinâmico (P_H) em um tubo parcialmente cheio corresponde às bordas da seção que estão em contato com o líquido, ou seja, o arco que toca tanto a parede do tubo quanto a superfície:

Assim, podemos expressá-lo geralmente em função de o raio do tubo (R) e la profundidade em um tubo vazio (h) da seguinte forma:
P_H = 2 R \arccos\left(1-\displaystyle\frac{h}{R}\right) + 2\sqrt{2Rh-h^2}
Para fluxos pequenos, onde a profundidade é significativamente menor que o raio, isso simplifica a relação entre a área da seção transversal e a profundidade para:
| P_H = \sqrt{2^5 R h } |
ID:(15897, 0)
Profundidade de um tubo vazio
Conceito
Em um tubo cilíndrico, a profundidade está relacionada com o fluxo da seguinte maneira:

Ao integrar la seção ou superfície (S), podemos calcular como a superfície varia em função de la profundidade em um tubo vazio (h) por meio da integral sobre o raio até O raio do tubo (R), o que resulta em:
S = 2\displaystyle\int_0^h dz \sqrt{2Rz - z^2}=\displaystyle\frac{1}{2}(R-h)\sqrt{2Rh - h^2}+\displaystyle\frac{1}{2}R^2\arcsin\left(\displaystyle\frac{1-h}{R}\right)
Para fluxos pequenos, onde a profundidade é significativamente menor que o raio, a relação entre a seção transversal e a profundidade se simplifica consideravelmente. Ao resolver a equação de profundidade, obtemos:
| h = \left(\displaystyle\frac{3^2 S^2 }{2^3 R }\right)^{1/3} |
ID:(15896, 0)
Raio hidráulico
Conceito
No contexto do fator de fricção de Darcy-Weisbach, utiliza-se um raio hidráulico (R_H), que é uma generalização do raio tradicional de um círculo. Dessa forma, é possível calcular um diâmetro com base na área de la seção de tubo (S) e seu perímetro em contato com o perímetro hidrodinâmico (P_H), utilizando a seguinte fórmula:
| R_H = \displaystyle\frac{ S }{ P_H } |
Para uma seção circular, podemos obter o raio hidráulico tradicional de um círculo da seguinte maneira:
R_H = \displaystyle\frac{S}{P} = \displaystyle\frac{\pi R^2}{2 \pi R} = \displaystyle\frac{1}{2} R
ID:(15895, 0)
Fluxo de volume instantâneo
Equação
Uma das leis mais básicas na física é a conservação da massa, que é válida em todo o nosso mundo macroscópico. Apenas no mundo microscópico existe uma conversão entre massa e energia, a qual não consideraremos neste caso. No caso de um fluido, isso significa que a massa que entra por um tubo deve ser igual à que sai dele.
Se a densidade for constante, o mesmo se aplica ao volume. Nestes casos, quando tratamos o fluxo como um fluido incompressível, significa que um determinado volume que entra em uma extremidade do tubo deve sair pela outra extremidade. Isso pode ser expresso como a igualdade entre o fluxona posição 1 (J_1) e o fluxona posição 2 (J_2), com a equação:
ID:(939, 0)
Diferença de pressão total de resistores em série (2)
Equação
No caso de resistências hidráulicas em série, a pressão cai em cada uma delas, e a soma dessas quedas de pressão é igual à diferença de pressão total ao longo de toda a série.
No caso de duas resistências em série, la resistência hidráulica 1 (R_{h1}) e la resistência hidráulica 2 (R_{h2}), com suas respectivas quedas de pressão la diferença de pressão 1 (\Delta p_1) e la diferença de pressão 2 (\Delta p_2), a soma dessas quedas é igual à diferença de pressão total la diferença total de pressão (\Delta p_t):
ID:(9943, 0)
Superfície de um disco
Equação
La superfície de um disco (S) de um raio do disco (r) é calculada da seguinte forma:
ID:(3804, 0)
Fluxo de volume e sua velocidade
Equação
Uma densidade de fluxo (j_s) pode ser expresso em termos de o fluxo de volume (J_V) utilizando la seção ou superfície (S) através da seguinte fórmula:
O fluxo é definido como o volume o elemento de volume (\Delta V) dividido pelo tempo o tempo decorrido (\Delta t), conforme expresso na seguinte equação:
| J_V =\displaystyle\frac{ \Delta V }{ \Delta t } |
e o volume é igual à área da seção la seção de tubo (S) multiplicada pela distância percorrida o elemento de tubo (\Delta s):
| \Delta V = S \Delta s |
Como a distância percorrida o elemento de tubo (\Delta s) por unidade de tempo o tempo decorrido (\Delta t) corresponde à velocidade, ela é representada por:
| j_s =\displaystyle\frac{ \Delta s }{ \Delta t } |
Assim, o fluxo é Uma densidade de fluxo (j_s), que é calculado usando:
| j_s = \displaystyle\frac{ J_V }{ S } |
ID:(4349, 0)
Número de Reynolds
Equação
O critério chave para determinar se um meio é laminar ou turbulento é o chamado número de Reynolds, que compara a energia associada à inércia com aquela associada à viscosidade. A primeira depende de la densidade (\rho), la velocidade média do fluido (v) e la dimensão típica do sistema (R), enquanto a segunda depende de la viscosidade (\eta), definindo-o como:
ID:(3177, 0)
Profundidade de um tubo vazio
Equação
La profundidade em um tubo vazio (h) pode ser estimado quando o nível do líquido é baixo, ou seja, quando esse nível é muito menor que o raio do tubo, em função de la seção ou superfície (S) e o raio do tubo (R):
La seção ou superfície (S) do tubo que contém o líquido pode ser expressa como uma função de la profundidade em um tubo vazio (h) integrando sobre o raio até O raio do tubo (R):
S = 2\displaystyle\int_0^h dz \sqrt{2Rz - z^2}=\displaystyle\frac{1}{2}(R-h)\sqrt{2Rh - h^2}+\displaystyle\frac{1}{2}R^2\arcsin\left(\displaystyle\frac{1-h}{R}\right)
Se expandirmos essa expressão em termos do fator h/R no limite h\ll R, obtemos, em primeira ordem:
S = \sqrt{\displaystyle\frac{2^3}{3^2} R h ^3}
Se resolvermos para a profundidade, obtemos finalmente:
| h = \left(\displaystyle\frac{3^2 S^2 }{2^3 R }\right)^{1/3} |
ID:(14541, 0)
Perímetro hidrodinâmico em tubo não preenchido
Equação
O perímetro hidrodinâmico (P_H) pode ser estimado a partir de la profundidade em um tubo vazio (h) e o raio do tubo (R) utilizando:
Como o ângulo entre o raio na borda da superfície do líquido e a vertical pode ser calculado usando la profundidade em um tubo vazio (h) e o raio do tubo (R) por meio de:
\phi =\arccos\left(1-\displaystyle\frac{h}{R}\right)
O arco correspondente é R\phi, portanto, o arco total é:
2 R \arccos\left(1-\displaystyle\frac{h}{R}\right)
De maneira análoga, metade da área pode ser determinada utilizando o teorema de Pitágoras, resultando em:
\sqrt{2Rh - h^2}
Portanto, o perímetro hidrodinâmico (P_H) é expresso como:
P_H = 2\sqrt{2Rh - h^2}+2R\arcsin\left(1-\displaystyle\frac{h}{R}\right)
No limite de uma pequena altura, onde h\ll R, essa expressão pode ser expandida, resultando em:
| P_H = \sqrt{2^5 R h } |
ID:(14542, 0)
Raio hidráulico
Equação
O raio hidráulico (R_H) pode ser calculado usando la seção de tubo (S) e o perímetro hidrodinâmico (P_H) por meio de:
ID:(14531, 0)
Diâmetro hidráulico
Equação
La diâmetro hidrodinâmico (D_H) pode ser calculado a partir de la seção de tubo (S) e o perímetro (P) por meio de:
ID:(14527, 0)
Solução para tubo fechado
Equação
A equação de Colebrook-White para o caso de um tubo fechado:
| \displaystyle\frac{1}{\sqrt{ f_D }}=-2\log\left(\displaystyle\frac{\epsilon}{3.7 D_H}+\displaystyle\frac{2.51}{ Re \sqrt{ f_D }}\right) |
é uma equação implícita utilizada para determinar o fator de atrito de Darcy-Weisbach (f_D). Para resolver esta equação, foram desenvolvidas várias aproximações que variam em complexidade e precisão. Uma das aproximações mais eficazes, que abrange uma ampla faixa de números de Reynolds Re, é a proposta por S.E. Haaland:
A solução original de S.E. Haaland é a seguinte:
\displaystyle\frac{1}{\sqrt{f_D}}=-1.8\log\left(\left(\displaystyle\frac{\epsilon/D_H}{3.7}\right)^{1.11} + \displaystyle\frac{6.9}{Re}\right)
Pode ser rearranjada para obter a expressão do fator de atrito de Darcy-Weisbach f_D da seguinte forma:
| f_D = \displaystyle\frac{25}{81 \log\left(\left(\displaystyle\frac{ \epsilon }{3.7 D_H }\right)^{1.11} + \displaystyle\frac{6.9}{ Re }\right)^2} |
ID:(14535, 0)
Equação de Darcy-Weisbach
Equação
A equação de Darcy-Weisbach permite calcular la diferença de pressão (\Delta p) em função de la densidade líquida (\rho_w), la diâmetro hidrodinâmico (D_H), o fator de atrito Darcy-Weisbach (f_D), o comprimento do tubo (\Delta L) e la velocidade média do fluido (v) através de:
ID:(14526, 0)
Perda de energia devido à turbulência e fricção
Equação
A equação de Darcy-Weisbach permite calcular la diferença de pressão (\Delta p) em função de la densidade líquida (\rho_w), la diâmetro hidrodinâmico (D_H), o fator de atrito Darcy-Weisbach (f_D), o comprimento do tubo (\Delta L) e la velocidade média do fluido (v) através de:
ID:(15958, 0)