

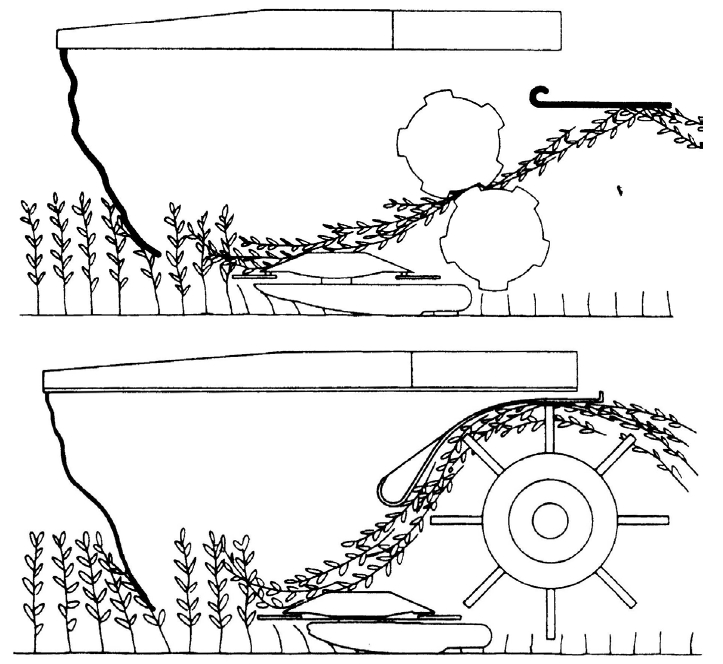
Geometría de corte
Image 
La clave esta en el rango del angulo de modo de que el roce evite que se deslice y se pueda cortar
ID:(12844, 0)
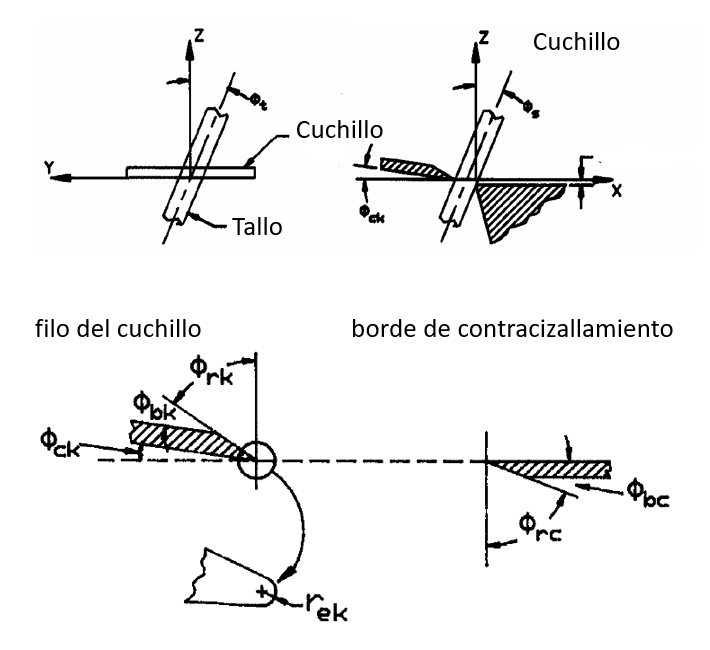
Angulo de corte
Equation
El angulo de corte se define en base a los ángulos del cuchillo y del elemento de soporte
| $ \phi_{cl} = \phi_{ok} + \phi_{oc} $ |
ID:(12845, 0)
Máximo angulo oblicuo del cuchillo
Equation
Para que exista deslizamiento de la planta el angulo oblicuo del cuchillo debe ser mayor a
| $ \phi_{ok,max} = \arctan f_{ek} $ |
donde
ID:(12846, 0)
Máximo angulo de corte
Equation
Para que exista deslizamiento de la planta el angulo de corte tiene que ser mayor a
| $ \phi_{cl,max} = \arctan\displaystyle\frac{ f_{ek} + f_{ec} }{1 - f_{ek} f_{ec} } $ |
donde
valores típicos son del primero en torno a 0.306 y del segundo en 0.364.
ID:(12847, 0)
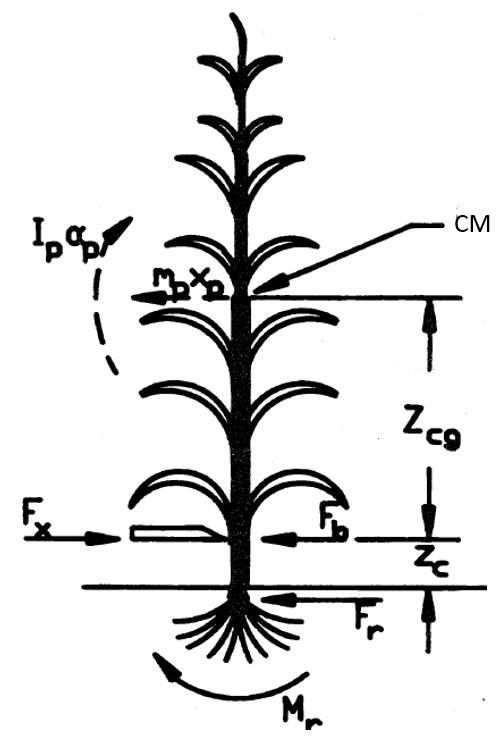
Fuerza de quiebre del tallo
Equation
La fuerza
donde
ID:(12848, 0)
Deflección radial en el corte
Equation
La deflección radial
donde
ID:(12849, 0)
Momento de inercia de una planta solida
Equation
En caso de que la planta es un cilindro solido (no hueco) el momento de inercia
donde
ID:(12850, 0)
Momento de inercia de una planta con centro hueco
Equation
En caso de que la planta es un cilindro hueco el momento de inercia
donde
ID:(12851, 0)
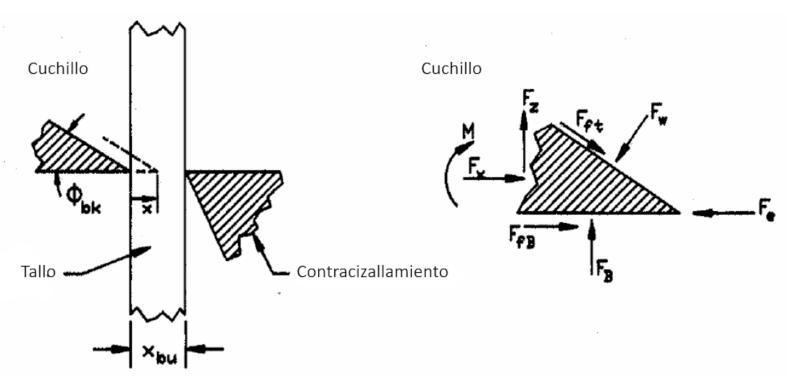
Fuerza de corte del cuchillo
Equation
La fuerza en x de corte del cuchillo
con
ID:(12852, 0)
Area frontal del cuchillo
Equation
El área frontal del cuchillo por ancho
con
ID:(12853, 0)
Potencia de corte
Equation
La potencia de corte
con la fuerza media de corte
ID:(12854, 0)
Ecuación de movimiento de la planta
Equation
En base a la fuerza aplicada por el cuchillo y la oposición de la planta se obtiene la ecuación que permite calcular la rotación de la planta
en onde
ID:(12856, 0)
Velocidad mínima de corte
Equation
Con la aceleración angular se puede calcular la velocidad mínima de impacto del cuchillo sobre la planta
ID:(12857, 0)