
Stabilité de la flottabilité
Storyboard 
La force générée par la flottaison agit au centre du volume déplacé, qui se trouve généralement plus bas que le centre de masse de l'objet dans l'eau. Cette paire de forces produit des couples qui peuvent stabiliser ou déstabiliser l'objet. Dans le second cas, il peut même se renverser. Ce principe s'applique aussi bien aux objets inanimés qu'aux organismes vivants, qui, en raison de maladies, peuvent avoir du mal à maintenir une position verticale.
ID:(1610, 0)
Mécanismes
Iframe
Mécanismes
ID:(15481, 0)
La catastrophe de Vasa
Description
Le navire de guerre suédois Vasa est un exemple connu d'un navire instable. Le 10 août 1628, seulement 20 minutes après avoir quitté le chantier naval lors de son voyage inaugural dans le port de Stockholm, le navire a chaviré et a coulé :

La conception du navire était défectueuse, car sa construction étroite visait à atteindre des vitesses élevées et sa structure haute était destinée à accueillir 64 canons, un nombre significatif. Cependant, cette conception rendait le navire intrinsèquement instable, ce qui a entraîné son chavirement avec la première rafale de vent.
Heureusement, le navire a coulé dans des eaux peu profondes et a été conservé dans l\'eau salée pendant 333 ans jusqu\'à sa récupération en 1961. Au début, le navire a été maintenu mouillé, puis lentement remplacé l\'eau par un mélange de cire qui permet de l\'exposer complètement sec dans un musée à quelques mètres de l\'endroit où il a coulé.
Le Vasa sert de rappel dans la construction navale, démontrant l\'importance d\'une conception soigneuse et de la stabilité. Son exposition au musée est une attraction populaire, attirant des visiteurs du monde entier pour voir cette pièce remarquable de l\'histoire maritime.
ID:(11977, 0)
Point d'attaque flottant
Description
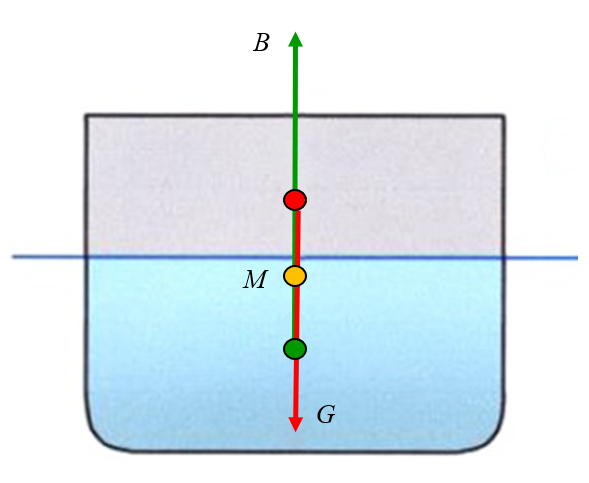
Le point d'application de la force de poussée est égal au centre de masse du volume de liquide déplacé :
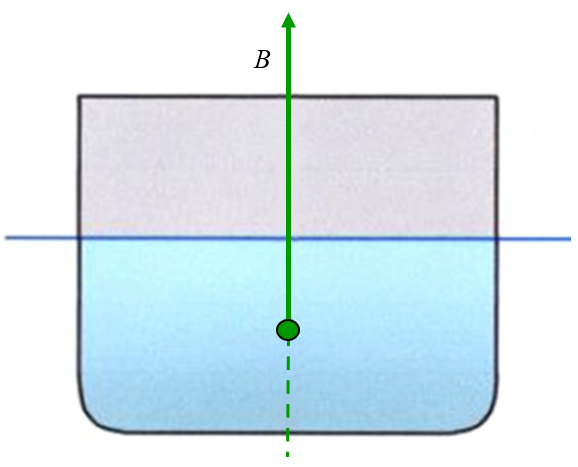
Dans un bateau de profil carré typique, cela correspond à un point situé à mi-profondeur (profondeur d\'immersion).
ID:(11957, 0)
Définir le métacentre
Description
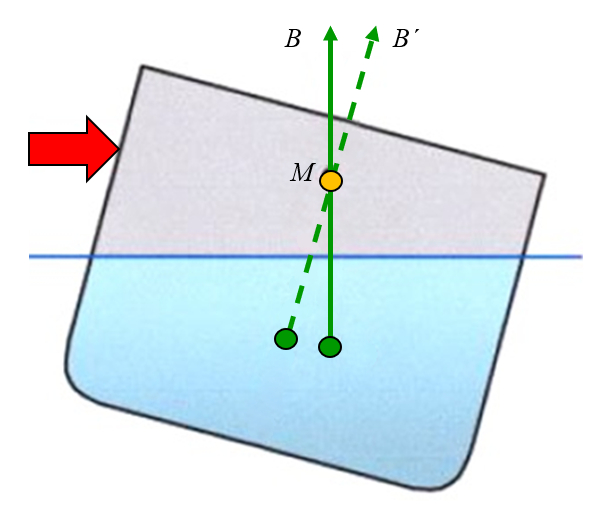
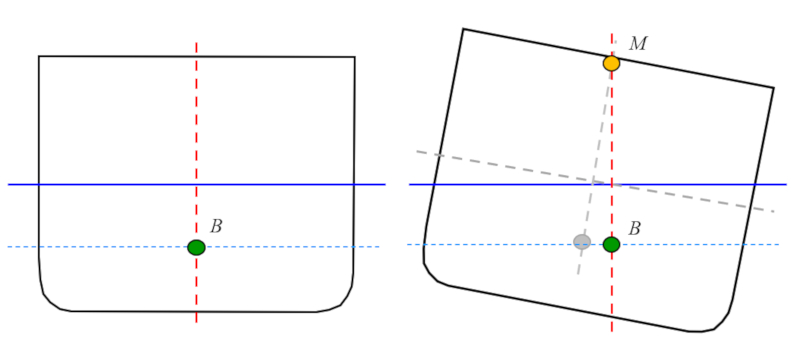
Lorsqu'une force latérale est appliquée et que l\'objet est incliné, on peut observer que le point où la force de flottaison agit se déplace hors de l\'axe. En traçant une ligne verticale depuis cette nouvelle position, on obtient que la ligne croise l\'axe central en un point appelé le métacentre :
ID:(11959, 0)
Action de la gravité
Concept
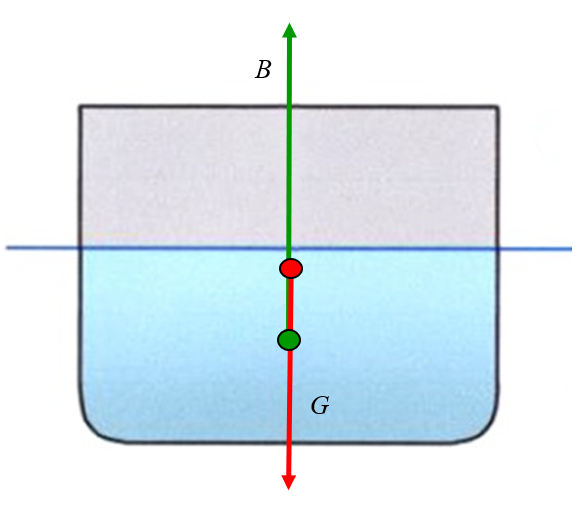
La gravité agit sur le centre de masse, qui se trouve généralement au-dessus du point d'application de la force de flottabilité, mais peut être au-dessus ou en dessous du métacentre :
ID:(11960, 0)
Situation stable
Description
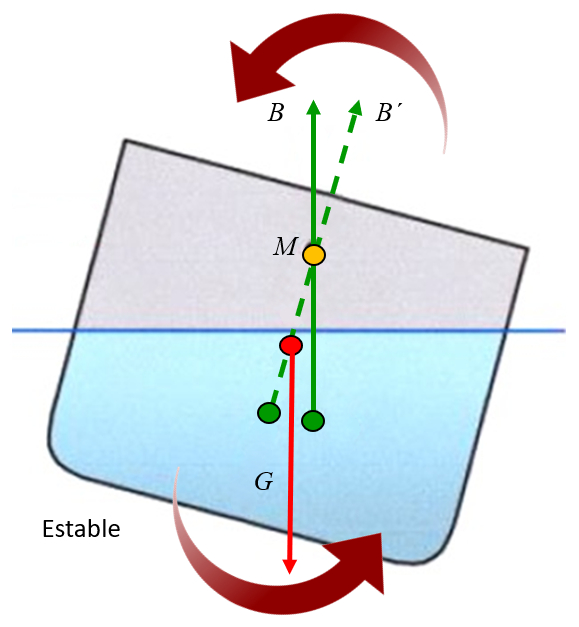
Si le métacentre est situé au-dessus du centre de masse, la force de gravité génère un couple qui a tendance à stabiliser l'objet. C\'est comme si l\'objet était suspendu au métacentre et que la force de gravité génère des rotations autour de celui-ci. Lorsque le centre de masse est situé en dessous du métacentre, le couple génère une rotation vers l\'axe, c\'est-à-dire qu\'il a tendance à corriger l\'inclinaison, stabilisant ainsi l\'objet :
ID:(11961, 0)
Métacentre sous le centre de gravité
Description
Si le métagcentre peut être situé au-dessus ou en dessous du centre de gravité. Ce dernier peut facilement se produire si une charge est ajoutée sur la partie supérieure, faisant ainsi monter le centre de masse, ce qui rend le système instable.
Note : pour éviter de perdre la stabilité, il est important de positionner la charge dans une position basse (fond du bateau).
ID:(11962, 0)
Situation instable
Description
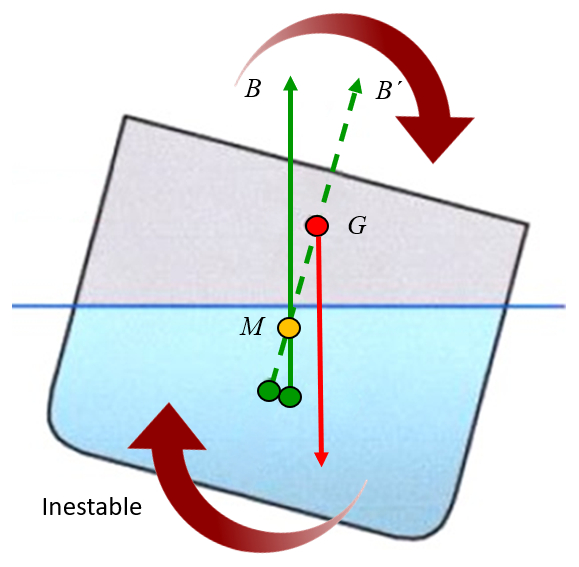
Si le métacentre est situé en dessous du centre de masse, la force de gravité génère un couple qui a tendance à déstabiliser l'objet. C\'est comme si l\'objet était suspendu au métacentre et que la force de gravité génère des rotations autour de celui-ci. Lorsque le centre de masse est situé au-dessus du métacentre, le couple génère une rotation qui l\'éloigne de l\'axe, c\'est-à-dire qu\'il a tendance à augmenter l\'inclinaison et donc à déstabiliser l\'objet :
ID:(11963, 0)
Maquette d'une coque de bateau
Description
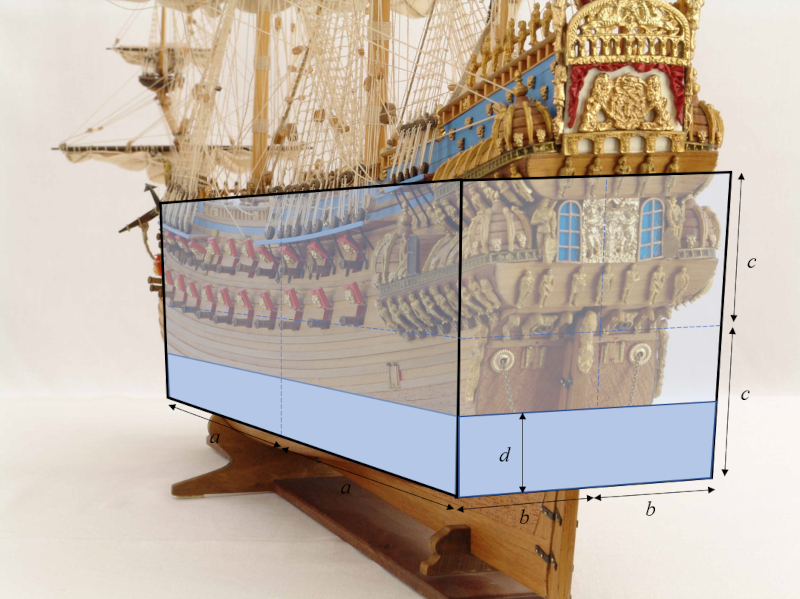
Le modèle de la coque du navire est réduit à un parallélépipède avec des longueurs de le demi-longueur du parallélépipède (a), le demi-largeur du parallélépipède (b) et a mi-hauteur du parallélépipède (c), ce qui donne des dimensions de 2a \times 2b \times 2c, avec un tirant d'eau de un brouillon d'objet (d) :
ID:(11969, 0)
Modèle simplifié: parallélépipède rectangle
Concept
Un modèle couramment utilisé pour les bateaux est celui d'un parallélépipède droit avec des longueurs de le demi-longueur du parallélépipède (a), le demi-largeur du parallélépipède (b) et a mi-hauteur du parallélépipède (c), et un centre de masse à son centre géométrique. Lorsqu'il est placé dans l'eau, le corps s'enfonce jusqu'à une profondeur de un brouillon d'objet (d). La position du centre où la force de flottaison agit peut être vue dans l'image suivante, avec les coordonnées a hauteur du point d'attaque, force de flottabilité (z_B), a hauteur du centre de masse (z_G) et a hauteur du métacentre (z_M) :
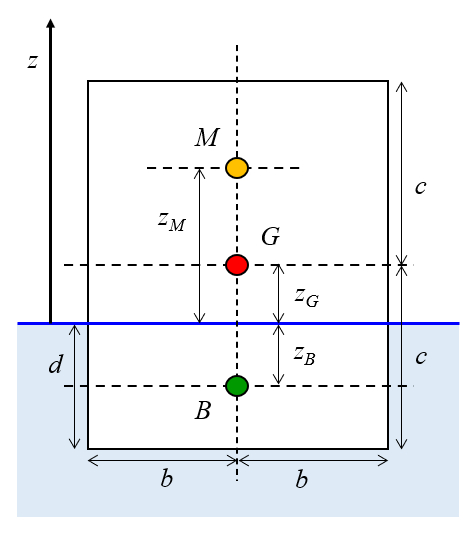
Donc a hauteur du centre de masse (z_G) est
| z_G = c - d |
ID:(11964, 0)
Définir la position du métacentre
Description
Le métacentre est calculé en déterminant le centre de masse du corps incliné sous la condition que la surface située sous la ligne de flottaison (ligne bleue) reste constante :
ID:(11979, 0)
Calcul de la position du centre de masse de l'eau déplacée
Description
Lorsque le bateau gîte, une plus grande section deau se déplace dun côté et la même plus petite section du côté opposé. Le centre de masse est donc déplacé du centre vers le secteur de plus grand déplacement, qui est calculé par
\bar{x} = \displaystyle\frac{\displaystyle\sum_i m_i x_i}{\displaystyle\sum_i m_i}
La masse est proportionnelle à la section calculée à partir de le demi-largeur du parallélépipède (b) et le brouillon d'objet (d) par :
2b d
Toutes les masses décalées des deux côtés de l'axe ne contribuent pas au numérateur et seuls les deux triangles indiqués à partir d'une zone avec le angle de gîte (\phi)
b^2\phi
pondérer la position du centre de masse des triangles
\displaystyle\frac{2b}{3}
ce que l'on voit sur le graphique :

Par conséquent, la distance au centre de masse de leau déplacée par rapport à laxe est
\displaystyle\frac{\displaystyle\frac{2b}{3} b^2\phi}{2bd}=\displaystyle\frac{b^2\phi}{3d}
ID:(14248, 0)
Calcul de la position du métacentre
Description
Si un navire gîte à Le angle de gîte (\phi), le centre de masse de l'eau déplacée se déplace avec le demi-largeur du parallélépipède (b) et le demi-longueur du parallélépipède (a) sur une distance de :
\displaystyle\frac{b^2\phi}{3d}
Puisque cette distance est l'arc de cercle que l'on peut tracer autour du métacentre, la distance entre le métacentre et le centre de masse de l'eau déplacée, qui correspond au rayon, est :
\displaystyle\frac{b^2}{3d}
Par conséquent, la position du métacentre doit tenir compte du fait que le centre de coordonnées est à la hauteur de la surface de l'eau, soit une distance d/2 au-dessus du centre de masse de l'eau déplacée :

avec a hauteur du métacentre (z_M):
| z_M = -\displaystyle\frac{ d }{2} + \displaystyle\frac{ b ^2}{ 3 d } |
ID:(11967, 0)
Analyse de la condition de stabilité du parallélépipède
Description
Pour que le parallélépipède soit stable, a hauteur du métacentre (z_M) doit toujours être supérieur ou égal à A hauteur du centre de masse (z_G), c'est-à-dire
| z_M \geq z_G |
Par conséquent, avec a hauteur du centre de masse (z_G) étant le point d'application de la force de flottaison donnée avec a mi-hauteur du parallélépipède (c) et le brouillon d'objet (d) :
| z_G = c - d |
et a hauteur du métacentre (z_M) étant avec le demi-largeur du parallélépipède (b) :
| z_M = -\displaystyle\frac{ d }{2} + \displaystyle\frac{ b ^2}{ 3 d } |
nous obtenons a condition de stabilité d'un corps flottant (e) :
| e = \displaystyle\frac{1}{6}\displaystyle\frac{ b ^2}{ c ^2} - \displaystyle\frac{ d }{2 c }\left(1-\displaystyle\frac{ d }{2 c }\right) |
ce qui signifie qu'il y a une région dans le graphe b/c (largeur/profondeur) versus d/2c (profondeur/hauteur) dans laquelle le système est stable, et dans son complément, instable :
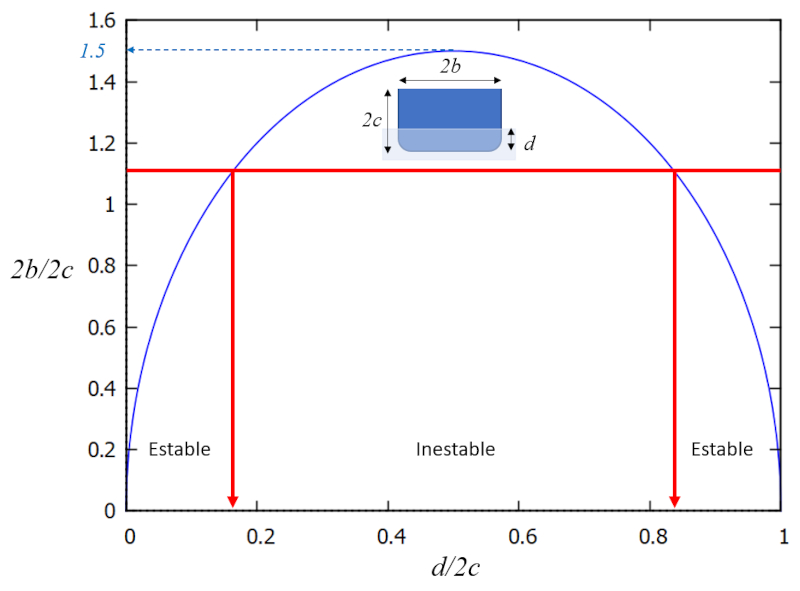
En d'autres termes, la stabilité est obtenue avec des valeurs élevées de b/c (largeur supérieure au tirant d'eau). Dans le cas du navire Vasa, le problème était que le navire était trop haut pour sa largeur. Une solution aurait été de "l'enfoncer plus profondément" ou d'atteindre une valeur d/c plus élevée pour éviter la zone d'instabilité. Cependant, cela n'était pas possible en raison des ouvertures pour les canons par lesquelles l'eau aurait pu entrer.
Pour plus d'informations sur les erreurs de construction, consultez Pourquoi le Vasa a coulé : 10 problèmes et quelques antidotes pour les projets logiciels, Richard E. Fairley, Mary Jane Willshire, mars/avril 2003 IEEE LOGICIEL, qui s'applique aux projets logiciels.
ID:(11976, 0)
Analyse de l\'affaire Wasa
Description
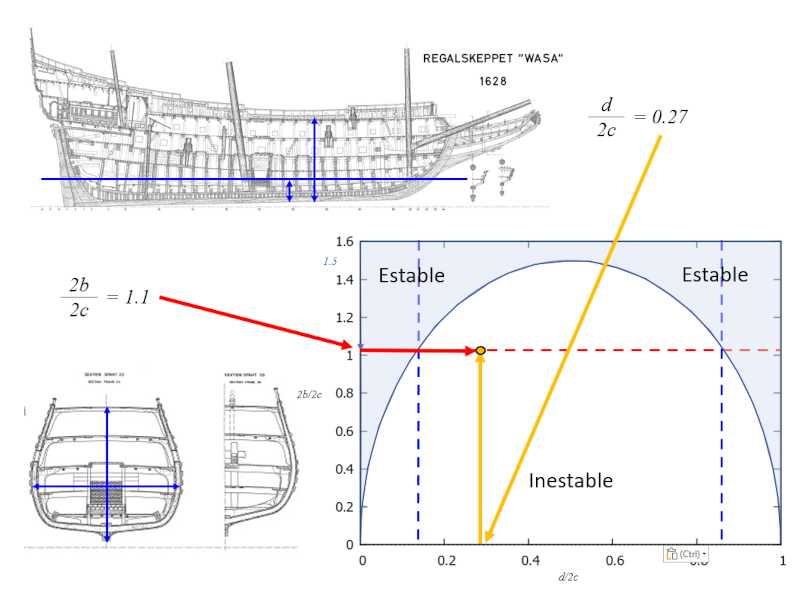
En étudiant les plans du Vasa, il est possible d\'estimer les coefficients de la relation entre la largeur et la hauteur, ainsi que entre le tirant d\'eau et la hauteur. Cette analyse révèle que le navire est instable:
ID:(14247, 0)
Modèle
Top
Paramètres
Variables
Calculs
Calculs
Calculs
Équations
e = \displaystyle\frac{1}{6}\displaystyle\frac{ b ^2}{ c ^2} - \displaystyle\frac{ d }{2 c }\left(1-\displaystyle\frac{ d }{2 c }\right)
e = b ^2/(6* c ^2) - d *(1 - d /(2* c ))/(2* c )
M_b = M_s
M_b = M_s
M_b =4 a b d \rho_w
M_b =4* a * b * d * rho_w
M_s =8 a b c \rho_s
M_s =8* a * b * c * rho_s
\displaystyle\frac{ \rho_s }{ \rho_w }= \displaystyle\frac{ d }{ 2 c }
rho_s / rho_w = d /(2* c )
V_b = 4 a b d
V_b = 4 * a * b * d
z_B =-\displaystyle\frac{ d }{2}
z_B =- d /2
z_G = c - d
z_G = c - d
z_M = -\displaystyle\frac{ d }{2} + \displaystyle\frac{ b ^2}{ 3 d }
z_M =- d /2 + b ^2/(3* d )
z_M \geq z_G
z_M >= z_G
ID:(15483, 0)
Flottation, en fonction de la masse
Équation
Si a force de poussée (F_b) et a force gravitationnelle (F_g) sont égaux, l'objet flottera. Dans ce cas, cela signifie que a masse d'un objet flottant (M_s) doit être égal à ($$), ce qui donne :
A force de poussée (F_b) est déterminé par a densité du liquide (\rho_w), le volume déplacé (V_b) et a accélération gravitationnelle (g) comme :
| F_b = \rho_w V_b g |
ce qui s'oppose à A force gravitationnelle (F_g) avec a masse d'un objet flottant (M_s) selon :
| F_g = m_g g |
donc, avec ($$) et a masse d'un objet flottant (M_s),
F_b = \rho_w V_w g = M_w g = M_s g = F_g
nous avons :
| M_b = M_s |
Note : cette relation n'est possible que si l'objet 'pèse moins que l'eau', ce qui signifie que l'eau déplacée occupe un volume égal ou supérieur à celui de l'objet.
ID:(11955, 0)
Masse de l'objet
Équation
A masse d'un objet flottant (M_s) peut être calculé à partir de a densité des objets (\rho_s) et du volume donné par ses paramètres géométriques le demi-longueur du parallélépipède (a), le demi-largeur du parallélépipède (b) et a mi-hauteur du parallélépipède (c).
Par conséquent :
ID:(11970, 0)
Masse d'eau déplacée par le modèle réduit de bateau
Équation
($$) peut être calculé à partir de a densité du liquide (\rho_w) et du volume donné par ses paramètres géométriques le demi-longueur du parallélépipède (a), le demi-largeur du parallélépipède (b) et le brouillon d'objet (d).
Donc :
ID:(11971, 0)
Volume déplacé
Équation
Le volume déplacé (V_b) peut être calculé à partir de ses paramètres géométriques le demi-longueur du parallélépipède (a), le demi-largeur du parallélépipède (b) et le brouillon d'objet (d).
Donc:
ID:(11968, 0)
Principe d'Archimède pour le parallélépipède
Équation
Le principe d'Archimède établit que la masse d'eau déplacée est égale à la masse de l'objet. Pour le cas spécifique du parallélépipède rectangle, cela peut être exprimé comme a densité des objets (\rho_s), a densité du liquide (\rho_w), le brouillon d'objet (d) et a mi-hauteur du parallélépipède (c) de la manière suivante :
Puisque le principe d'Archimède stipule que ($$) est égal à A masse d'un objet flottant (M_s),
| M_b = M_s |
nous avons ($$) lié à A densité du liquide (\rho_w), le demi-longueur du parallélépipède (a), le demi-largeur du parallélépipède (b) et le brouillon d'objet (d) comme suit :
| M_b =4 a b d \rho_w |
et a masse d'un objet flottant (M_s) lié à A densité des objets (\rho_s), le demi-longueur du parallélépipède (a), le demi-largeur du parallélépipède (b) et a mi-hauteur du parallélépipède (c) comme suit :
| M_s =8 a b c \rho_s |
ce qui implique que
| \displaystyle\frac{ \rho_s }{ \rho_w }= \displaystyle\frac{ d }{ 2 c } |
ID:(11972, 0)
Position du point d'attaque de la force flottante
Équation
Le point d'application de la force de flottaison se trouve au centre de masse du volume d\'eau déplacé par le bateau. Dans le cas où le bateau n\'est pas incliné (escoré), ce point se situe au centre du volume à mi-hauteur du tirant d\'eau.
En tenant compte de cela, vous pouvez exprimer a hauteur du point d'attaque, force de flottabilité (z_B) en fonction de le brouillon d'objet (d) soit :
ID:(11965, 0)
Position du point d'attaque de la force gravitationnelle
Équation
Le point d'application de la force gravitationnelle correspond au centre du parallélépipède qui modélise la coque. Si nous fixons le système de coordonnées sur la surface de l'eau, a hauteur du centre de masse (z_G) sera donné en soustrayant le brouillon d'objet (d) de a mi-hauteur du parallélépipède (c) :
ID:(11966, 0)
Position du métacentre du parallélépipède
Équation
Le calcul de a hauteur du métacentre (z_M) à partir de la distance entre le métacentre et le centre de masse de l'eau déplacée, exprimée par le demi-largeur du parallélépipède (b) et le brouillon d'objet (d), est effectué comme suit:
ID:(11973, 0)
État de stabilité
Équation
Pour que l'objet soit stable, a hauteur du métacentre (z_M) doit toujours être supérieur ou égal à A hauteur du centre de masse (z_G).
Par conséquent, cela doit être :
ID:(11974, 0)
Condition de stabilité pour le parallélépipède
Équation
Pour un parallélépipède rectangle, a condition de stabilité d'un corps flottant (e) avec le demi-largeur du parallélépipède (b), a mi-hauteur du parallélépipède (c) et le brouillon d'objet (d) est :
Pour que le parallélépipède soit stable, a hauteur du métacentre (z_M) doit toujours être supérieur ou égal à A hauteur du centre de masse (z_G), c'est-à-dire
| z_M \geq z_G |
Par conséquent, avec a hauteur du centre de masse (z_G) étant le point d'application de la force de flottaison donnée avec a mi-hauteur du parallélépipède (c) et le brouillon d'objet (d) :
| z_G = c - d |
et a hauteur du métacentre (z_M) étant avec le demi-largeur du parallélépipède (b) :
| z_M = -\displaystyle\frac{ d }{2} + \displaystyle\frac{ b ^2}{ 3 d } |
nous obtenons a condition de stabilité d'un corps flottant (e) :
| e = \displaystyle\frac{1}{6}\displaystyle\frac{ b ^2}{ c ^2} - \displaystyle\frac{ d }{2 c }\left(1-\displaystyle\frac{ d }{2 c }\right) |
ce qui est supérieur à un dans le cas d'une situation stable et négatif dans le cas d'une instabilité.
ID:(11975, 0)