
Constant angular velocity, two stages
Storyboard 
If during a movement at constant angular velocity there is a change in this velocity, it results in a movement occurring in two stages, each characterized by a defined angular velocity.
Each stage is modeled with a linear relationship represented by a line, where the key lies in the fact that the time and final angle of the first stage are, in turn, the time and initial angle of the second stage.
It's important to note that this model presents a problem: the angular velocity changes instantaneously, which is equivalent to an angular acceleration followed by an infinite deceleration, which is unrealistic. However, this problem is not relevant if the duration of the stages is considerably longer than the time in which the change in angular velocity occurs.
ID:(1410, 0)
Two-stage concept
Concept
A body can move to the first stage angular velocity ($\omega_1$) and then transition to a the second stage angular velocity ($\omega_2$). This marks the beginning of a new stage, and it's necessary to describe both mathematically in order to predict their motion.
The key is to note that both stages have a common point characterized by:
• The final angle of the first stage and the initial angle of the second stage, the first final angle and second stage began ($\theta_1$).
• The final time of the first stage and the initial time of the second stage, the final time of first and start of second stage ($t_1$).
With this, the diagrams of angle over time can be coupled as shown in the following representation:

ID:(12518, 0)
Angular velocities in two stages
Concept
In a scenario of movement in two stages, first the object advances a angle traveled in the first stage ($\Delta\theta_1$) during a time spent in the first stage ($\Delta t_1$) with a first stage angular velocity ($\omega_1$).
| $ \omega_1 \equiv\displaystyle\frac{ \Delta\theta_1 }{ \Delta t_1 }$ |
Subsequently, in the second stage, it advances a angle traveled in the second stage ($\Delta\theta_2$) during a time spent in the second stage ($\Delta t_2$) with a second stage angular velocity ($\omega_2$).
| $ \omega_2 \equiv\displaystyle\frac{ \Delta\theta_2 }{ \Delta t_2 }$ |
When representing this graphically, we obtain an angle and time diagram as shown below:
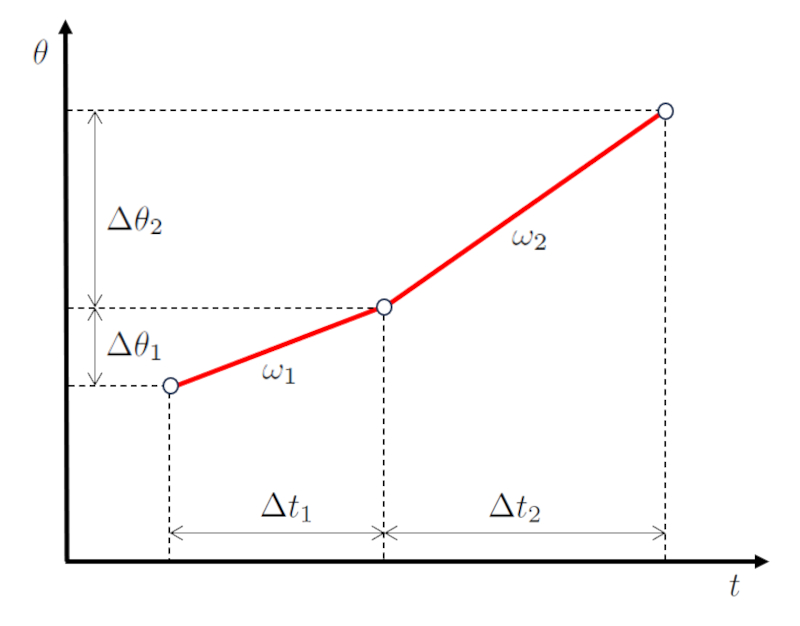
The key here is that the values the time spent in the first stage ($\Delta t_1$) and the time spent in the second stage ($\Delta t_2$) are sequential, just like the values the angle traveled in the first stage ($\Delta\theta_1$) and the angle traveled in the second stage ($\Delta\theta_2$).
ID:(12525, 0)
Angles and times in two stages
Description
In the case of a two-stage movement, the first stage can be described by a function involving points the start Time ($t_0$), the final time of first and start of second stage ($t_1$), the initial Angle ($\theta_0$), and the first final angle and second stage began ($\theta_1$), represented by a line with a slope of the first stage angular velocity ($\omega_1$):
| $ \theta_1 = \theta_0 + \omega_1 ( t_1 - t_0 )$ |
For the second stage, defined by points the first final angle and second stage began ($\theta_1$), the second stage final angle ($\theta_2$), the final time of first and start of second stage ($t_1$), and the second stage ending time ($t_2$), a second line with a slope of the second stage angular velocity ($\omega_2$) is used:
| $ \theta_2 = \theta_1 + \omega_2 ( t_2 - t_1 )$ |
which is represented as:
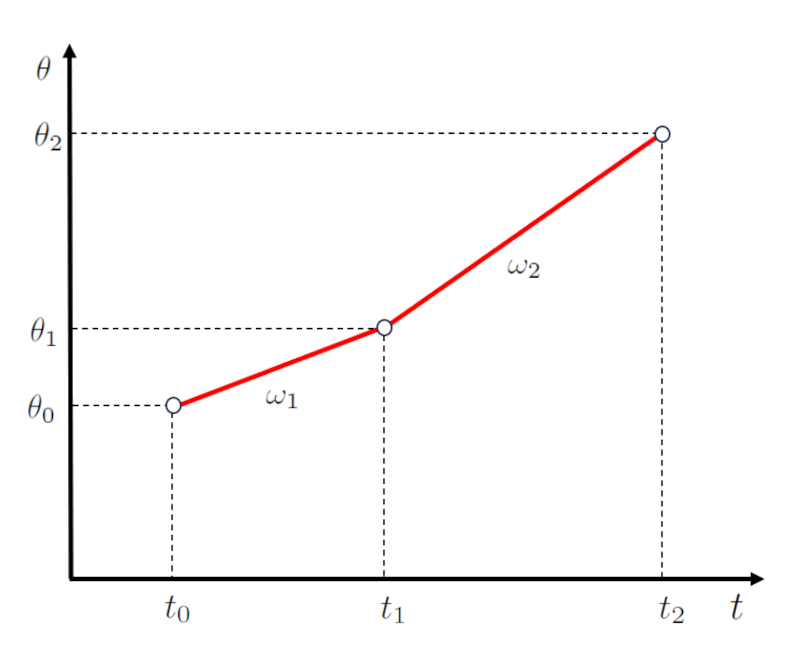
It is important to note that the beginning of the second stage, defined by points the final time of first and start of second stage ($t_1$) and the first final angle and second stage began ($\theta_1$), coincides with the end of the first stage.
ID:(12517, 0)
Constant angular velocity, two stages
Model
If during a movement at constant angular velocity there is a change in this velocity, it results in a movement occurring in two stages, each characterized by a defined angular velocity.
Each stage is modeled with a linear relationship represented by a line, where the key lies in the fact that the time and final angle of the first stage are, in turn, the time and initial angle of the second stage.
Variables
Calculations
Calculations
Equations
In the case where the initial Angular Speed ($\omega_0$) is equal to the mean angular velocity ($\bar{\omega}$),
| $ \bar{\omega} = \omega_0 $ |
Therefore, with the difference of Angles ($\Delta\theta$), which is equal to the angle ($\theta$) divided by the initial Angle ($\theta_0$), we obtain:
| $ \Delta\theta = \theta_2 - \theta_1 $ |
And with the time elapsed ($\Delta t$), which is equal to the time ($t$) divided by the start Time ($t_0$), we obtain:
| $ \Delta t \equiv t - t_0 $ |
We can rewrite the equation for the mean angular velocity ($\bar{\omega}$) as:
| $ \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
This can be expressed as:
$\omega_0 = \omega = \displaystyle\frac{\Delta\theta}{\Delta t} = \displaystyle\frac{\theta - \theta_0}{t - t_0}$
Solving for it, we get:
| $ \theta = \theta_0 + \omega_0 ( t - t_0 )$ |
(ID 1023)
In the case where the initial Angular Speed ($\omega_0$) is equal to the mean angular velocity ($\bar{\omega}$),
| $ \bar{\omega} = \omega_0 $ |
Therefore, with the difference of Angles ($\Delta\theta$), which is equal to the angle ($\theta$) divided by the initial Angle ($\theta_0$), we obtain:
| $ \Delta\theta = \theta_2 - \theta_1 $ |
And with the time elapsed ($\Delta t$), which is equal to the time ($t$) divided by the start Time ($t_0$), we obtain:
| $ \Delta t \equiv t - t_0 $ |
We can rewrite the equation for the mean angular velocity ($\bar{\omega}$) as:
| $ \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
This can be expressed as:
$\omega_0 = \omega = \displaystyle\frac{\Delta\theta}{\Delta t} = \displaystyle\frac{\theta - \theta_0}{t - t_0}$
Solving for it, we get:
| $ \theta = \theta_0 + \omega_0 ( t - t_0 )$ |
(ID 1023)
As the mean Speed ($\bar{v}$) is with the distance traveled in a time ($\Delta s$) and the time elapsed ($\Delta t$), equal to
| $ \bar{v} \equiv\displaystyle\frac{ \Delta s }{ \Delta t }$ |
and with the distance traveled in a time ($\Delta s$) expressed as an arc of a circle, and the radius ($r$) and the angle variation ($\Delta\theta$) are
| $ \Delta s=r \Delta\theta $ |
and the definition of the mean angular velocity ($\bar{\omega}$) is
| $ \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
then,
$v=\displaystyle\frac{\Delta s}{\Delta t}=r\displaystyle\frac{\Delta\theta}{\Delta t}=r\omega$
Since the relationship is general, it can be applied for instantaneous values, resulting in
| $ v = r \omega $ |
.
(ID 3233)
As the mean Speed ($\bar{v}$) is with the distance traveled in a time ($\Delta s$) and the time elapsed ($\Delta t$), equal to
| $ \bar{v} \equiv\displaystyle\frac{ \Delta s }{ \Delta t }$ |
and with the distance traveled in a time ($\Delta s$) expressed as an arc of a circle, and the radius ($r$) and the angle variation ($\Delta\theta$) are
| $ \Delta s=r \Delta\theta $ |
and the definition of the mean angular velocity ($\bar{\omega}$) is
| $ \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
then,
$v=\displaystyle\frac{\Delta s}{\Delta t}=r\displaystyle\frac{\Delta\theta}{\Delta t}=r\omega$
Since the relationship is general, it can be applied for instantaneous values, resulting in
| $ v = r \omega $ |
.
(ID 3233)
The definition of the mean angular velocity ($\bar{\omega}$) is considered as the angle variation ($\Delta\theta$),
| $ \Delta\theta = \theta_2 - \theta_1 $ |
and the time elapsed ($\Delta t$),
| $ \Delta t \equiv t - t_0 $ |
The relationship between both is defined as the mean angular velocity ($\bar{\omega}$):
| $ \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
(ID 3679)
The definition of the mean angular velocity ($\bar{\omega}$) is considered as the angle variation ($\Delta\theta$),
| $ \Delta\theta = \theta_2 - \theta_1 $ |
and the time elapsed ($\Delta t$),
| $ \Delta t \equiv t - t_0 $ |
The relationship between both is defined as the mean angular velocity ($\bar{\omega}$):
| $ \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
(ID 3679)
Examples
(ID 15410)
A body can move to the first stage angular velocity ($\omega_1$) and then transition to a the second stage angular velocity ($\omega_2$). This marks the beginning of a new stage, and it's necessary to describe both mathematically in order to predict their motion.
The key is to note that both stages have a common point characterized by:
• The final angle of the first stage and the initial angle of the second stage, the first final angle and second stage began ($\theta_1$).
• The final time of the first stage and the initial time of the second stage, the final time of first and start of second stage ($t_1$).
With this, the diagrams of angle over time can be coupled as shown in the following representation:
(ID 12518)
In a scenario of movement in two stages, first the object advances a angle traveled in the first stage ($\Delta\theta_1$) during a time spent in the first stage ($\Delta t_1$) with a first stage angular velocity ($\omega_1$).
| $ \omega_1 \equiv\displaystyle\frac{ \Delta\theta_1 }{ \Delta t_1 }$ |
Subsequently, in the second stage, it advances a angle traveled in the second stage ($\Delta\theta_2$) during a time spent in the second stage ($\Delta t_2$) with a second stage angular velocity ($\omega_2$).
| $ \omega_2 \equiv\displaystyle\frac{ \Delta\theta_2 }{ \Delta t_2 }$ |
When representing this graphically, we obtain an angle and time diagram as shown below:
The key here is that the values the time spent in the first stage ($\Delta t_1$) and the time spent in the second stage ($\Delta t_2$) are sequential, just like the values the angle traveled in the first stage ($\Delta\theta_1$) and the angle traveled in the second stage ($\Delta\theta_2$).
(ID 12525)
In the case of a two-stage movement, the first stage can be described by a function involving points the start Time ($t_0$), the final time of first and start of second stage ($t_1$), the initial Angle ($\theta_0$), and the first final angle and second stage began ($\theta_1$), represented by a line with a slope of the first stage angular velocity ($\omega_1$):
| $ \theta_1 = \theta_0 + \omega_1 ( t_1 - t_0 )$ |
For the second stage, defined by points the first final angle and second stage began ($\theta_1$), the second stage final angle ($\theta_2$), the final time of first and start of second stage ($t_1$), and the second stage ending time ($t_2$), a second line with a slope of the second stage angular velocity ($\omega_2$) is used:
| $ \theta_2 = \theta_1 + \omega_2 ( t_2 - t_1 )$ |
which is represented as:
It is important to note that the beginning of the second stage, defined by points the final time of first and start of second stage ($t_1$) and the first final angle and second stage began ($\theta_1$), coincides with the end of the first stage.
(ID 12517)
(ID 15421)
ID:(1410, 0)