
Total kinetic energy
Storyboard 
The total kinetic energy is the sum of the kinetic energy of translation and the kinetic energy of rotation.This distinction is important because depending on how an object moves, the kinetic energy can be distributed differently between translation and rotation, affecting the speed at which it moves.
ID:(1418, 0)
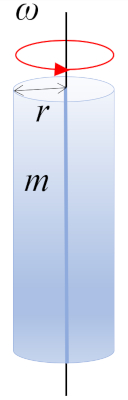
Cylinder rotating around axis $\parallel$
Image
A rotation of a cylinder with mass $m$ and radius $r$ around the axis of the cylinder, where the center of mass (CM) is located at mid-height:
ID:(10964, 0)
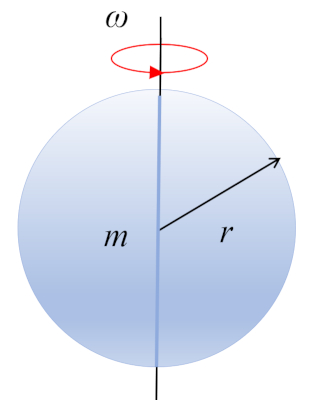
Sphere
Image
A sphere with mass $m$ and radius $r$ is rotating around its center of mass, which is located at its geometric center:
ID:(10490, 0)
Total kinetic energy
Model
The total kinetic energy is the sum of the kinetic energy of translation and the kinetic energy of rotation. This distinction is important because depending on how an object moves, the kinetic energy can be distributed differently between translation and rotation, affecting the speed at which it moves.
Variables
Calculations
Calculations
Equations
The energy required for an object to change its angular velocity from $\omega_1$ to $\omega_2$ can be calculated using the definition
| $ \Delta W = T \Delta\theta $ |
Applying Newton's second law, this expression can be rewritten as
$\Delta W=I \alpha \Delta\theta=I\displaystyle\frac{\Delta\omega}{\Delta t}\Delta\theta$
Using the definition of angular velocity
| $ \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
we get
$\Delta W=I\displaystyle\frac{\Delta\omega}{\Delta t}\Delta\theta=I \omega \Delta\omega$
The difference in angular velocities is
$\Delta\omega=\omega_2-\omega_1$
On the other hand, angular velocity itself can be approximated with the average angular velocity
$\omega=\displaystyle\frac{\omega_1+\omega_2}{2}$
Using both expressions, we obtain the equation
$\Delta W=I \omega \Delta \omega=I(\omega_2-\omega_1)\displaystyle\frac{(\omega_1+\omega_2)}{2}=\displaystyle\frac{I}{2}(\omega_2^2-\omega_1^2)$
Thus, the change in energy is given by
$\Delta W=\displaystyle\frac{I}{2}\omega_2^2-\displaystyle\frac{I}{2}\omega_1^2$
This allows us to define kinetic energy as
| $ K_t =\displaystyle\frac{1}{2} m_i v ^2$ |
(ID 3244)
The work variance ($\Delta W$) required for an object to change from the initial Angular Speed ($\omega_0$) to the angular Speed ($\omega$) is obtained by applying a the torque ($T$) that produces an angular displacement the difference of Angles ($\Delta\theta$), according to:
| $ \Delta W = T \Delta\theta $ |
Applying Newton's second law for rotation, in terms of the moment of inertia for axis that does not pass through the CM ($I$) and the mean Angular Acceleration ($\bar{\alpha}$):
| $ T = I \alpha $ |
this expression can be rewritten as:
$\Delta W = I \alpha \Delta\theta$
or, using the difference in Angular Speeds ($\Delta\omega$) and the time elapsed ($\Delta t$):
| $ \bar{\alpha} \equiv \displaystyle\frac{ \Delta\omega }{ \Delta t }$ |
we get:
$\Delta W = I\displaystyle\frac{\Delta\omega}{\Delta t} \Delta\theta$
Using the definition of the mean angular velocity ($\bar{\omega}$) and the time elapsed ($\Delta t$):
| $ \bar{\omega} \equiv\displaystyle\frac{ \Delta\theta }{ \Delta t }$ |
results in:
$\Delta W = I\displaystyle\frac{\Delta\omega}{\Delta t} \Delta\theta = I\omega \Delta\omega$
where the difference in Angular Speeds ($\Delta\omega$) is expressed as:
| $ \Delta\omega = \omega_2 - \omega_1 $ |
On the other hand, the angular velocity can be approximated by the average angular velocity:
$\bar{\omega}=\displaystyle\frac{\omega_1 + \oemga_2}{2}$
By combining both expressions, we obtain the equation:
$\Delta W = I \omega \Delta\omega = I(\omega_2 - \omega_1) \displaystyle\frac{(\omega_1 + \omega_2)}{2} = \displaystyle\frac{I}{2}(\omega_2^2 - \omega_1^2)$
Therefore, the change in energy is expressed as:
$\Delta W = \displaystyle\frac{I}{2}\omega_2^2 - \displaystyle\frac{I}{2}\omega_1^2$
This allows us to define the rotational kinetic energy as:
| $ K_r =\displaystyle\frac{1}{2} I \omega ^2$ |
(ID 3255)
(ID 3686)
When an object rolls, its angular velocity is related to its translational velocity by
| $ v = r \omega $ |
resulting in the rotational kinetic energy
| $ K_r =\displaystyle\frac{1}{2} I \omega ^2$ |
which becomes
$K_r=\displaystyle\frac{1}{2}I \omega^2=\displaystyle\frac{1}{2} I \displaystyle\frac{v^2}{r^2}=\displaystyle\frac{1}{2}\left(\displaystyle\frac{I}{r^2}\right)v^2$
Thus, when combining the translational kinetic energy
| $ K_t =\displaystyle\frac{1}{2} m v ^2$ |
the kinetic energy of a rotating body is calculated by the sum
| $ K = K_t + K_r $ |
meaning,
| $ K =\displaystyle\frac{1}{2}\left( m + \displaystyle\frac{ I }{ r ^2}\right) v ^2$ |
(ID 9877)
The total Kinetic Energy ($K$) corresponds to the sum of the translational Kinetic Energy ($K_t$) and the kinetic energy of rotation ($K_r$):
| $ K = K_t + K_r $ |
Since the translational Kinetic Energy ($K_t$) is expressed as a function of the inertial Mass ($m_i$) and the speed ($v$):
| $ K_t =\displaystyle\frac{1}{2} m v ^2$ |
and the kinetic energy of rotation ($K_r$), as a function of the moment of inertia for axis that does not pass through the CM ($I$) and the angular Speed ($\omega$), is defined as:
| $ K_r =\displaystyle\frac{1}{2} I \omega ^2$ |
the final expression is:
| $ K =\displaystyle\frac{1}{2} m_i v ^2+\displaystyle\frac{1}{2} I \omega ^2$ |
(ID 9944)
Examples
(ID 15605)
(ID 15607)
ID:(1418, 0)